

Introductory course on aerial robotics, University of Pennsylvania
Beginner
Video
Theory
This course exposes you to the mechanics, design, control, and planning of robotic flight in 3 dimensional environments for micro-aerial vehicles, with an emphasis on quadrotors.
See More")
Course Introduction (Signal Processing 101)
2 min
Beginner
Video
Theory
Learn Signal Processing 101 in 31 lectures covering time, frequency and Laplace domain in about 8 hours all together:https://www.youtube.com/watch?v=KZd68xga...
See More
The Fast Fourier Transform Algorithm
10 min
Beginner
Video
Theory
Here I discuss the Fast Fourier Transform (FFT) algorithm, one of the most important algorithms of all time.
See More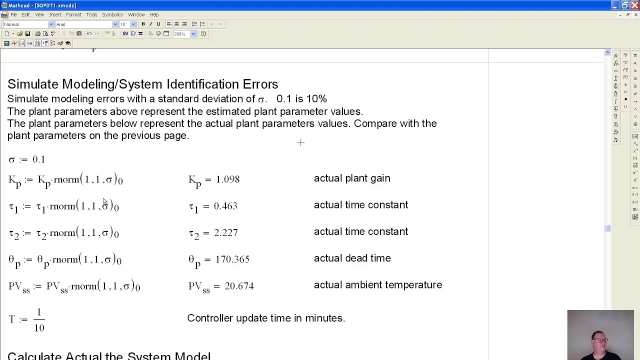
Peter Ponders PID. Second Order Plus Dead Time , SOPDT, Temperature Control,...
12 min
Beginner
Video
Theory
In this video I derive the equations for the controller gains and a low pass filter for a SOPDT system with a very long dead time To make the simulation mo...
See More
Lecture 31: Time response, Controllability and Observability
33 min
Beginner
Video
Theory

Closed Loop Feedback Control
13 min
Beginner
Video
Theory
Intro to closed loop (feedback) control motivation, theory, block diagrams and block diagram algebra, and PID controllers
See More
Peter Ponders PID - Tank Level Control
20 min
Beginner
Video
Theory

Lecture 19: Lead and PD compensator Design using Root Locus
54 min
Beginner
Video
Theory

Bode Plot Gain and Phase Margin Determination
5 min
Beginner
Video
Theory
I'll show you how we can determine the Gain and Phase Margin from a Bode Plot (at some fixed controller gain).
See More
Control Bootcamp: Laplace Transforms and the Transfer Function
19 min
Beginner
Video
Theory
Here we show how to compute the transfer function using the Laplace transform.
See More
Designing a Lead Compensator with Root Locus
13 min
Beginner
Video
Theory
This video walks through a phase lead compensator example using the Root Locus method.
See More
Homogeneous Linear Ordinary Differential Equations
74 min
Beginner
Video
Theory
In this video we discuss how to solve homogeneous linear ordinary differential equations (ODEs). The approach outlined in this lecture is applicable to high...
See More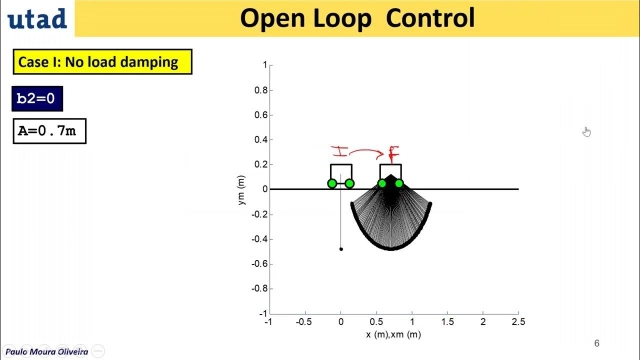
Posicast Control -3 - ( In English )
8 min
Beginner
Video
Theory
In this video a Gantry-Crane control simulation problem is introduced. The problem is presented and some introductory simulations are shown.
See More
Control Bootcamp: Three Equivalent Representations of Linear Systems
12 min
Beginner
Video
Theory
This video explores three equivalent representations of linear systems: State-space ODEs, Frequency domain transfer functions, and Time-domain impulse response convolution.
See More
The Inverse Laplace Transform
48 min
Beginner
Video
Theory
In this video we show how to perform the inverse Laplace transform on a signal in the Laplace domain to obtain its equivalent representation in the time doma...
See More
Lectures on Adaptive Control and Learning by Tansel Yucelen
Beginner
Video
Theory
A serie of lectures on the topic of adaptive controllers.
See More
Machine Learning Goals
7 min
Beginner
Video
Theory
This lecture discusses the high-level goals of machine learning, and what we want out of our models. Goals include speed and accuracy, along with interpretability, generalizability...
See More
Sketching Root Locus Part 2
16 min
Beginner
Video
Theory
This is the second part of how to sketch a root locus by hand. However instead of following the normal rules for sketching a locus that you'd see in a book, I decided to explain the rules...
See More
Final Value Theorem
33 min
Beginner
Video
Theory
In this video we discuss the Final Value Theorem. Given a signal in the Laplace domain, this allows us to predict the steady state value of the signal in th...
See More
Neural Networks and Deep Learning
7 min
Beginner
Video
Theory
This lecture explores the recent explosion of interest in neural networks and deep learning in the context of 1) vast and increasing data sets, and 2) rapidly improving computational...
See More
Heat Transfer Demonstration
63 min
Beginner
Video
Theory
In this video we demonstrate heat transfer through a metal bar. By heating one side of the bar we can impose a non-uniform temperature distribution across t...
See More
Digital Twins
8 min
Beginner
Video
Theory
This lecture discusses the use of data-driven digital twins in advanced model-based design and engineering, and the related digital thread, which ties together the data throughout an entire...
See More
Time domain - tutorial 5: signal properties
11 min
Beginner
Video
Theory
In this video, we learn about some special signals which are symmetric around the y-axis (even) or around the origin (odd) . Then we talk about periodic sign...
See More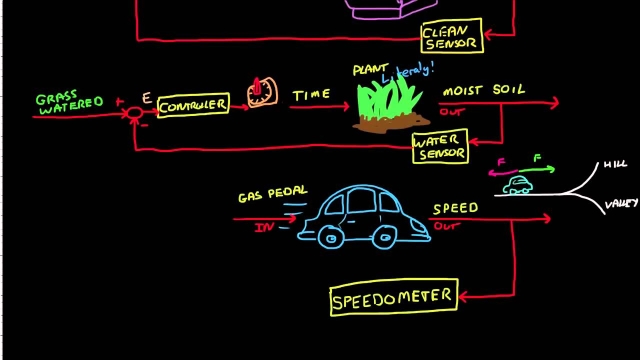
Control Systems Lectures - Closed Loop Control
9 min
Beginner
Video
Theory
This lecture discusses the differences between open loop and closed loop control.
See More
Frequency domain – tutorial 10: modulation
22 min
Beginner
Video
Theory
In this video, we learn about modulation technique which is commonly used in communication systems to send information from transmitter to receiver. The foll...
See More