

Wind Tunnel Data Analysis and Testing Considerations
111 min
Intermediate
Video
Theory
This is the last video in our 3 part series on wind tunnel testing. In this video, we discuss what typical plots of wind tunnel data might look like and how to extract relevant information...
See More
Neural Network Overview
7 min
Beginner
Video
Theory
This lecture gives an overview of neural networks, which play an important role in machine learning today.
See More
How I put the Google Maps Algorithm on my Autonomous Drone
13 min
Intermediate
Video
Application
This fully autonomous drone has an onboard computer ‘brain’, camera ‘eyes’, and an algorithm that generates the fastest path around unknown obstacles as they’re detected mid-flight. Let’s...
See More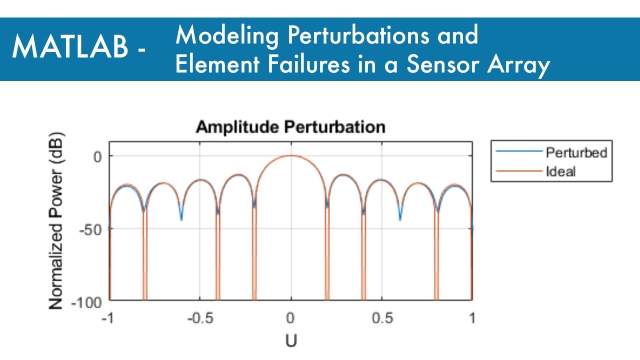
Modeling Perturbations and Element Failures in a Sensor Array
Beginner
Example
Demonstration
This MATLAB example shows how to model amplitude, phase, position and pattern perturbations as well as element failures in a sensor array.
See More
Bridging the Gap: Using Real World Problems to Unveil Deep Control Principle...
52 min
Intermediate
Video
Application
This is a plenary lecture given at the 2020 IEEE Conference on Control Systems Technology, Montreal, Canada, August 24-26, 2020. There is no paper, but this is the video of the talk.
See More
MATLAB Command: lqr
Intermediate
Article / Blog
Application
MATLAB command documentation for the Linear-Quadratic Regulator (lqr) function.
See More
Control Bootcamp: Limitations on Robustness
9 min
Beginner
Video
Theory
This video describes some of the fundamental limitations of robustness, including time delays and right-half plane zeros.
See More
Nonlinear System Identification | System Identification, Part 3
17 min
Beginner
Video
Theory
Learn about nonlinear system identification by walking through one of the many possible model options: A nonlinear ARX model. Brian Douglas covers the importance of adding an offset term to...
See More
Controlling Robotic Swarms
13 min
Beginner
Video
Theory
Come with me to the Robotics, Aerospace, and Information Networks lab at the University of Washington to learn the basics of swarm robotics. Find out how simple distributed algorithms can...
See More
Jupyter Notebook: Code used to generate vibrational control of inverted pend...
Intermediate
Software
Demonstration
Jupyter Notebook: Code used to generate vibrational control of inverted pendulum figures
See More
Toys for Control Education
Intermediate
App
Theory
Teaching materials for control engineering education that run in web browsers. Speed control, position control, step response of 2nd order system, pole and impulse response, and rocket.
See More
Základy automatizácie a teórie systémov – videokurz (Slovak)
Beginner
Article / Blog
Theory
Pozrite si videokurz zo základov teórie systémov a automatizácie. Náš kurz má 7 lekcií.
See More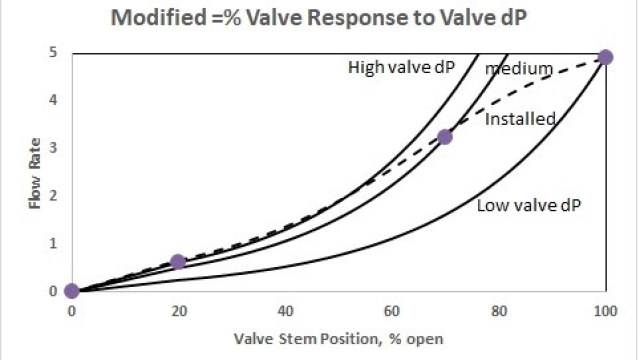
Understanding Valve Flow Characteristics
20 min
Intermediate
Article / Blog
Application
The response of flow rate through a control valve depends on the friction losses in the piping in which it is installed as well as the controller signal. The installed characteristic (a...
See More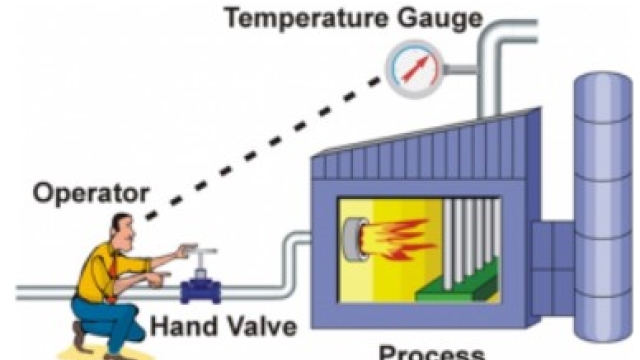
PID Explained
20 min
Beginner
Article / Blog
Theory
A qualitative explanation of P, I, & D actions using graphs.
See More
A simple MEMS gyro model using MATLAB / Simulink
16 min
Beginner
Video
Theory
This video walks through how to model a simple MEMS gyroscope using MATLAB/Simulink. At the end I show you how to linearize this model to use in your linear control loop design and analysis.
See More
Control Systems in Practice, Part 5: A Better Way to Think About a Notch Fil...
13 min
Beginner
Video
Theory
This video describes an intuitive way to approach notch filter design by thinking about the problem as an inverted, lightly damped, second-order low-pass filter. Then, two additional poles...
See More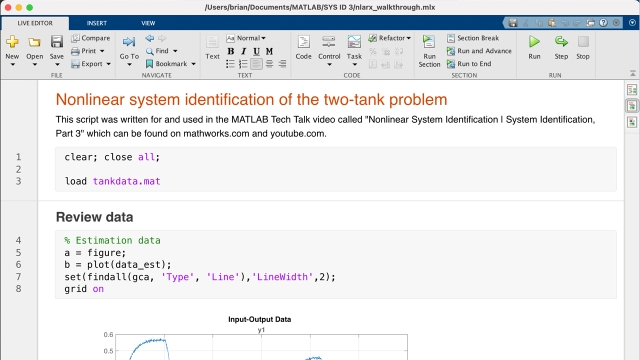
MATLAB scripts for "Nonlinear System Identification | System Identification,...
Intermediate
Software
Demonstration
This Github repo contains the data files and MATLAB scripts that were used in "Nonlinear System Identification | System Identification, Part 3".
See More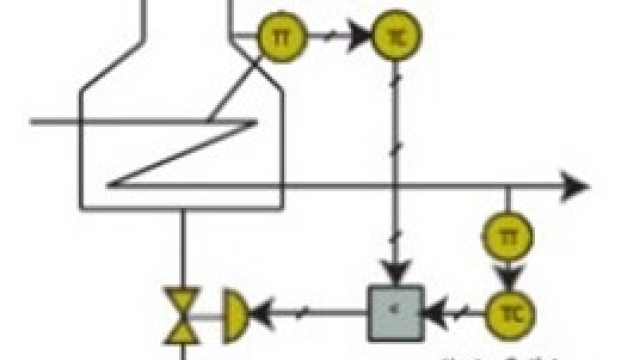
Override and Reset Feedback
15 min
Intermediate
Article / Blog
Application
Override controllers are for safety or switching to auxiliary variables. The non-selected controller needs to prevent becoming wound up.
See More
Dealing with Non-Stationarity in Multi-Agent Deep Reinforcement Learning
Intermediate
Peer Reviewed Paper
Theory
From the abstract
Recent developments in deep reinforcement learning are concerned with creating decision-making agents which can perform well in various complex domains. A particular...
See More
Using Transfer Learning | Deep Learning for Engineers, Part 4
16 min
Beginner
Video
Theory
This video introduces the idea of transfer learning. Transfer learning is modifying an existing deep network architecture and then retraining it to accomplish your task rather than the task...
See More
Control Design Onramp with Simulink
60 min
Beginner
Software
Demonstration
Learn the basics of feedback control design in Simulink®. Adjust the gains of a PID controller to change the dynamics of a physical system and get the closed-loop system behavior that you...
See More
MATLAB Discovery Page - Anomaly Detection
Beginner
Article / Blog
Theory
Anomaly detection is the process of identifying events or patterns that differ from expected behavior. Anomaly detection can range from simple outlier detection to complex machine learning...
See More
Converting Constrained Optimization to Unconstrained Optimization Using the ...
54 min
Beginner
Video
Theory
In this video we show how to convert a constrained optimization problem into an approximately equivalent unconstrained optimization problem using the penalty...
See More
Control Systems in Practice, Part 1: What Control Systems Engineers Do
14 min
Beginner
Video
Theory
This video walks through the phases of a typical project and describes what it means to be a control systems engineer. It covers the concept formulation phase, in which your job is to help...
See More
Projectile Motion Practice Problems
28 min
Intermediate
Video
Application
In this video, practice along questions on an important topic of Kinematics i.e Projectile Motion. Practicing would help you remember the concepts and also understand them better.
See More