

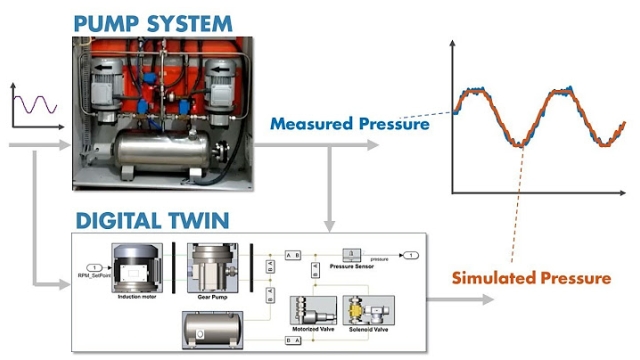
Digital Twin Parameter Tuning
9 min
Beginner
Video
Theory
Learn how to tune the digital twin model of a pump system to its physical asset using Simulink Design Optimization™. You can use measured data collected from the physical system to tune the...
See More
Laplace domain – tutorial 1: Laplace transform
15 min
Beginner
Video
Theory
In this video, we learn about Laplace transform which enables us to travel from time to the Laplace domain. The following materials are covered:1) why we nee...
See More
Computing the DFT Matrix
7 min
Beginner
Video
Theory
This video discusses how to compute the Discrete Fourier Transform (DFT) matrix in Matlab and Python. In practice, the DFT should usually be computed using the fast Fourier transform (FFT)...
See More
Euler Angles and the Euler Rotation Sequence
70 min
Intermediate
Video
Theory
In this video we discuss how Euler angles are used to define the relative orientation of one coordinate frame to another.
See More
Particle Filter Explained without Equations
7 min
Beginner
Video
Theory
This video provides a quick graphical introduction to the particle filter. It does a good job building some intuition behind the filter without ever touching on any mathematics. It's worth a...
See More
Machine Learning Course by Andrew Ng
1120 min
Beginner
Course
Application
A very comprehensive and detailed course in machine learning , best suited for beginners with knowledge of high school linear mathematics.
See More
Frequency domain – tutorial 9: frequency response
23 min
Beginner
Video
Theory
In this video, the learning objectives are to:1- fully understand the frequency response which forms the foundation of filtering 2- quickly review the common...
See More")
The Fast Fourier Transform (FFT)
8 min
Beginner
Video
Application
Here I introduce the Fast Fourier Transform (FFT), which is how we compute the Fourier Transform on a computer. The FFT is one of the most important algorithms of all time.
See More
Dynamic Behavior and Input Types in Process Control
13 min
Beginner
Video
Theory
An introduction to the four types of dynamic behavior and five types of inputs (step, ramp, pulse, impulse, and sinusoidal), and why transfer functions are u...
See More
Process Control Introduction
14 min
Beginner
Video
Theory
An overview on state variables, inputs (manipulated and disturbance variables), outputs (measured state variables), and an example on the balance equations w...
See More
Lecture 28: Lag Compensator Design using Bode Plots
51 min
Beginner
Video
Theory
 control")
Control Bootcamp: Cruise Control Example with Proportional-Integral (PI) co...
23 min
Beginner
Video
Theory
In this video, we show that introducing integral control reduces the steady-state tracking error to zero in the cruise control example. We also use a more sophisticated model for the...
See More
IMC based PID Design for a First Order Process
8 min
Beginner
Video
Theory
IMC based PID Design for a First Order Process
See More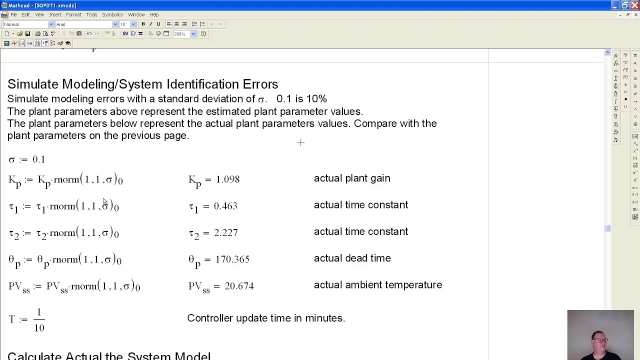
Peter Ponders PID. Second Order Plus Dead Time , SOPDT, Temperature Control,...
12 min
Beginner
Video
Theory
In this video I derive the equations for the controller gains and a low pass filter for a SOPDT system with a very long dead time To make the simulation mo...
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 16 - Monte Ca...
67 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
Working with Synthetic Data | Deep Learning for Engineers, Part 2
18 min
Beginner
Video
Theory
This video covers the first step in deep learning: having access to data. Part of making the decision of whether deep learning is right for your project comes down to the type and amount of...
See More
Peter Ponders PID - Tank Level Control
20 min
Beginner
Video
Theory
Introduction to System Stability and Control
11 min
Beginner
Video
Theory
This video attempts to provide an intuitive understanding of concepts like stability and stability margin. I briefly describe both of these topics with examples and explain how you can...
See More")
Koopman Spectral Analysis (Overview)
27 min
Intermediate
Video
Theory
In this video, we introduce Koopman operator theory for dynamical systems. The Koopman operator was introduced in 1931, but has experienced renewed interest recently because of the...
See More
Smart Projectile State Estimation Using Evidence Theory
Intermediate
Peer Reviewed Paper
Theory
This journal article provides a very good practical understanding of Dempster-Shafer theory using sensor fusion and state estimation as the backdrop.
See More
Root Locus Plot: Common Questions and Answers
17 min
Beginner
Video
Theory
In this video I go through some of the common questions I've received on my other root locus videos. 1) Why do we call the poles of a system the roots?2) How do I plot the damping ratio...
See More
Numerically Calculating Partial Derivatives
59 min
Beginner
Video
Theory
In this video we discuss how to calculate partial derivatives of a function using numerical techniques. In other words, these partials are calculated withou...
See More![Controllability, Reachability, and Eigenvalue Placement [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_304.jpg?itok=qj48C5IZ)
Controllability, Reachability, and Eigenvalue Placement [Control Bootcamp]
10 min
Beginner
Video
Theory
This lecture explains the equivalence of controllability, reachability, and the ability to arbitrarily place eigenvalues of the closed loop system.
See More![Randomized SVD Code [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_401.jpg?itok=3jscmfnI)
Randomized SVD Code [Matlab]
9 min
Beginner
Video
Application
This video describes the randomized singular value decomposition (rSVD) (Matlab code).
See More
Gain and Phase Margins Explained!
13 min
Beginner
Video
Theory
In this video I explain gain and phase margins. If you are confused by this topic I hope this video will help tie all of the concepts together that go into understanding what gain and phase...
See More