


Heat Transfer Demonstration
63 min
Beginner
Video
Theory
In this video we demonstrate heat transfer through a metal bar. By heating one side of the bar we can impose a non-uniform temperature distribution across t...
See More
Control Bootcamp: Loop shaping
7 min
Beginner
Video
Theory
This video explores shaping the loop transfer function to have desirable sensitivity and complementary sensitivity.
See More
Manipulating Aerodynamic Coefficients
25 min
Intermediate
Video
Theory
In this video we discuss some potential problems you may encounter when attempting to perform operations with dimensionless aerodynamic coefficients such as CL and CD.
See More
Gimbal Lock in reference to the Apollo missions
4 min
Intermediate
Video
Theory
A gimbal is a pivoted support that permits rotation of an object about an axis. For this reason, a set of three axes gimbals are used in spacecrafts to help with orientation attitude control...
See More![Denoising Data with FFT [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_359.jpg?itok=UEtxZc00 "Denoising Data with FFT [Python]")
Denoising Data with FFT [Python]
10 min
Beginner
Video
Application
This video describes how to clean data with the Fast Fourier Transform (FFT) in Python.
See More
Frequency domain – tutorial 2: Fourier series
25 min
Beginner
Video
Theory
In this video, we learn Fourier series which enables us to travel from time to the frequency domain when a signal is periodic. The following materials are co...
See More
Sparse Identification of Nonlinear Dynamics for Model Predictive Control
12 min
Intermediate
Video
Theory
This lecture shows how to use sparse identification of nonlinear dynamics with control (SINDYc) with model predictive control to control nonlinear systems purely from data.
See More
The Fourier Transform
14 min
Beginner
Video
Theory
This video will discuss the Fourier Transform, which is one of the most important coordinate transformations in all of science and engineering.
See More
Time domain - tutorial 1: what is signal processing?
1 min
Beginner
Video
Theory
In this video, we review the concept of signal processing and why it is useful to learn it. Learn Signal Processing 101 in 31 lectures covering time, frequen...
See More
Inputs and Outputs as defined by a Process Control Engineer
7 min
Beginner
Video
Theory
Defining process inputs and outputs is a lot more complicated than I initially thought when I was learning about process control. In this video, I share how ...
See More
Lecture 31: Time response, Controllability and Observability
33 min
Beginner
Video
Theory

Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 3 - Model-Fr...
73 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Understanding PID Control, Part 2: Expanding Beyond a Simple Integral
10 min
Beginner
Video
Theory
The first video in this series described a PID controller, and it showed how each of the three branches help control your system.That seemed simple enough and appeared to work. However, in...
See More
Override and Reset Feedback
15 min
Intermediate
Article / Blog
Application
Override (Select, Safety, Switch) control observes an auxiliary variable and takes over from the primary controller when a limit is exceeded. Reset feedback is a method to prevent the non...
See More
Peter Ponders PID - Lead/lag closed loop control
20 min
Beginner
Video
Theory


Control Systems with MATLAB: An Introduction
43 min
Beginner
Video
Theory

RL Course by David Silver - Lecture 4: Model-Free Prediction
97 min
Intermediate
Video
Theory
An introduction to Monte-Carlo Learning and Temporal Difference Learning
See More
Lecture 25: Nyquist stability criterion
48 min
Beginner
Video
Theory

Kalman Filter Tutorial
Beginner
Article / Blog
Theory
The Kalman Filter is an easy topic. However, many tutorials are not easy to understand. Most require extensive mathematical background which makes them difficult to understand. Also, most...
See More
Understanding The Sensitivity Function
13 min
Beginner
Video
Theory
In this video I explain the sensitivity function and try to demystify the equation used to solve for the nominal sensitivity peak. Sensitivity describes how much process variations affect...
See More![Reachability and Controllability with Cayley-Hamilton [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_306.jpg?itok=SzmzyZ6Z)
Reachability and Controllability with Cayley-Hamilton [Control Bootcamp]
10 min
Beginner
Video
Theory
Here we use the Cayley-Hamilton Theorem to show that the full state space is reachable if and only if the system is controllable.
See More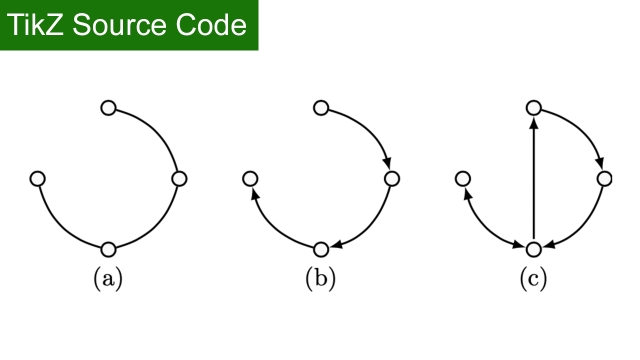
TikZ source Code: Example Graph
Beginner
Source Code
Application
TikZ source Code: Example Graph
See More
Computing Euler Angles: The Euler Kinematical Equations and Poisson’s Kinema...
79 min
Beginner
Video
Theory
In this video we discuss how the time rate of change of the Euler angles are related to the angular velocity vector of the vehicle. This allows us to design...
See More
Randomized SVD: Power Iterations and Oversampling
4 min
Intermediate
Video
Theory
This video discusses the randomized SVD and how to make it more accurate with power iterations (multiple passes through the data matrix) and oversampling.
See More