


The Inverse Laplace Transform
48 min
Beginner
Video
Theory
In this video we show how to perform the inverse Laplace transform on a signal in the Laplace domain to obtain its equivalent representation in the time doma...
See More
Data-Driven Control: Eigensystem Realization Algorithm Procedure
17 min
Intermediate
Video
Theory
In this lecture, we describe the eigensystem realization algorithm (ERA) in detail, including step-by-step algorithmic instructions.
See More![SVD: Importance of Alignment [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_421.jpg?itok=xDlrjOXt)
SVD: Importance of Alignment [Matlab]
6 min
Beginner
Video
Application
This video describes the importance of aligning data when using the singular value decomposition (SVD) (Matlab code).
See More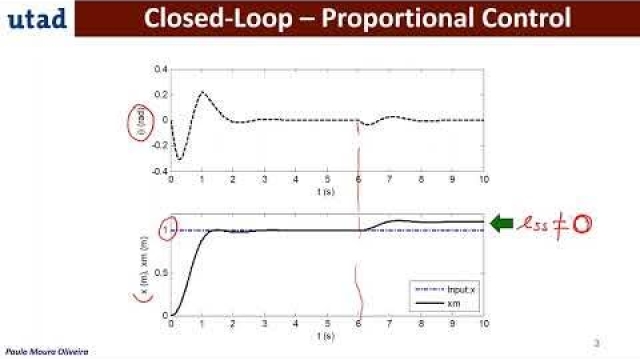
Posicast Control 5 - (In English)
7 min
Beginner
Video
Theory
In this video Posicast in closed-loop is illustrated using a gantry-crane system simulations.
See More
Understanding and Sketching Individual Bode Plot Components
148 min
Beginner
Video
Theory
In this video we illustrate how 7 types of simple transfer functions contribute to a bode plot. We refer to these as ‘components’ and will cover the followi...
See More
Sliding Mode Control Design for a Robotic Manipulator
Intermediate
Example
Application
This MATLAB/Simulink example shows how to design a controller for a robotic manipulator with two actuated joints using sliding mode control (SMC). SMC is useful for systems that require...
See More![Linear Regression 2 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_437.jpg?itok=jfYpmzNR "Linear Regression 2 [Python]")
Linear Regression 2 [Python]
5 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for linear regression in Python (part 2).
See More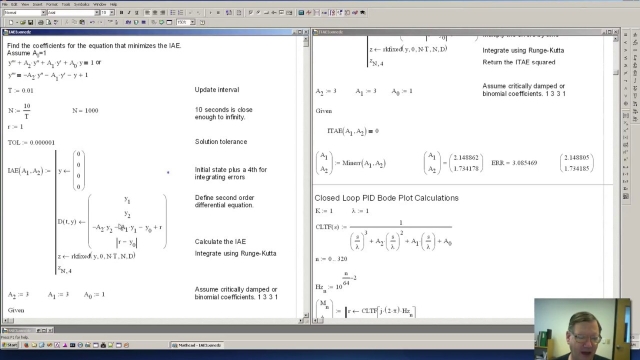
Peter Ponders PID - IAE,ITAE,ISE Performance indicators
17 min
Beginner
Video
Theory
Performance indicators can be used to compute closed loop pole locations. Only one gain parameter is required to move the pole locations closer to the origi...
See More
Derivation of the 2D Wave Equation
27 min
Beginner
Video
Theory
In this video we derive the 2D wave equation. This partial differential equation governs the motion of waves in a plane and is applicable for thin vibrating...
See More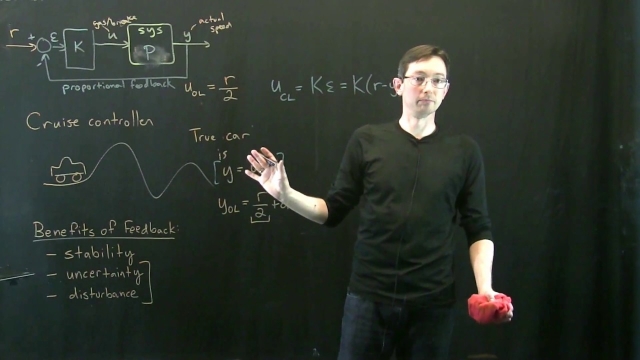
Control Bootcamp: Benefits of Feedback on Cruise Control Example
14 min
Beginner
Video
Theory
Here we investigate the benefits of feedback for systems with uncertain dynamics and disturbances, as illustrated on a cruise control example.
See More
Machine Learning Control: Tuning a PID Controller with Genetic Algorithms
16 min
Beginner
Video
Theory
This lecture shows how to use genetic algorithms to tune the parameters of a PID controller. Tuning a PID controller with genetic algorithms is not generally recommended, but is used to...
See More
Auto Tuning a Small DC Motor in Torque Mode
1 min
Beginner
Video
Theory
I was really testing the picture in picture feature of the Screen Flow software I use to make these videos. I knew the auto tuning would work. I kept the v...
See More
Frequency domain – tutorial 8: frequency spectra
9 min
Beginner
Video
Theory
In this video, we learn about frequency spectra which can be divided into two parts: phase and magnitude spectrum. Some examples will be provided to practice...
See More
Using a Homogeneous Transformation Matrix to Combine Rotation and Translatio...
63 min
Intermediate
Video
Theory
In this video we discuss how to properly deal with coordinate frames that are both rotated and translated from one another. We develop a homogeneous transformation matrix which combines a...
See More
Basic Control Lectures
Beginner
Presentation
Theory
Systems approach, understanding and describing the operation of systems and methods of controlling them are among the basic knowledge of engineering education. But understanding the main...
See More
Understanding Model Predictive Control, Part 7: Adaptive MPC Design with Sim...
8 min
Beginner
Video
Theory
In this video, you will learn how to design an adaptive MPC controller for an autonomous steering vehicle system whose dynamics change with respect to the longitudinal velocity. After you...
See More
TikZ source Code: Feedback passivity index
Beginner
Source Code
Application
TikZ source Code: Feedback passivity index
See More
Robust Principal Component Analysis (RPCA)
22 min
Intermediate
Video
Theory
Robust statistics is essential for handling data with corruption or missing entries. This robust variant of principal component analysis (PCA) is now a workhorse algorithm in several fields...
See More
Frequency domain – tutorial 11: equalization
11 min
Beginner
Video
Theory
In this video, we learn about equalization technique which is used in communication systems to compensate for the destructive effect of the channel between t...
See More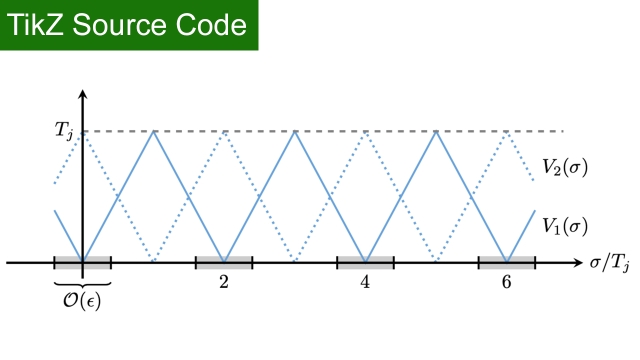
TikZ source Code: Lyapunov Lure
Beginner
Source Code
Application
TikZ source Code: Lyapunov Lure
See More
Process Control Introduction
14 min
Beginner
Video
Theory
An overview on state variables, inputs (manipulated and disturbance variables), outputs (measured state variables), and an example on the balance equations w...
See More
Lecture 16: More on Root Locus and Gain Compensation
43 min
Beginner
Video
Theory
 control")
Control Bootcamp: Cruise Control Example with Proportional-Integral (PI) co...
23 min
Beginner
Video
Theory
In this video, we show that introducing integral control reduces the steady-state tracking error to zero in the cruise control example. We also use a more sophisticated model for the...
See More
IMC based PID Design for a First Order Process
8 min
Beginner
Video
Theory
IMC based PID Design for a First Order Process
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 1 - Introduct...
66 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group