


Lecture 19: Lead and PD compensator Design using Root Locus
54 min
Beginner
Video
Theory

RL Course by David Silver - Lecture 1: Introduction to Reinforcement Learnin...
88 min
Intermediate
Video
Theory
Introduces reinforcment learning (RL), an overview of agents and some classic RL problems.
See More")
How to Land on a Planet (and how it'll be done in the future!)
15 min
Beginner
Video
Theory
This video covers the basic ideas behind how engineers develop the algorithms that allow autonomous robots to land on other planetary bodies.
See More
Equations of Motion for a Planar Vehicle
43 min
Beginner
Video
Theory
In this video we outline equations of motion for a simple planar vehicle. This model is suitable for vehicles such as boats or hovercraft that that are rest...
See More
Lecture 14: Routh Hurwitz Criterion
22 min
Beginner
Video
Theory
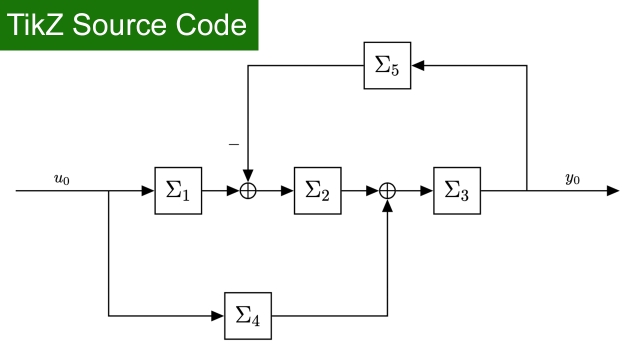
TikZ source Code: Nested subsystems
Beginner
Source Code
Application
TikZ source Code: Nested subsystems
See More
Routh-Hurwitz Criterion, Special Cases
13 min
Beginner
Video
Theory
This video presents two special cases that you can encounter when filling out the Routh Array. The first case is when there is a zero in a row with at least one non-zero element following...
See More")
A Nonlinear, 6 DOF Dynamic Model of an Aircraft: the Research Civil Aircraft...
103 min
Beginner
Video
Theory
In this video we develop a dynamic model of an aircraft by describing forces and moments generated by aerodynamic, propulsion, and gravity that act on the ai...
See More![Controllability and the Discrete-Time Impulse Response [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_302.jpg?itok=xjXmM9_U)
Controllability and the Discrete-Time Impulse Response [Control Bootcamp]
5 min
Beginner
Video
Theory
This lecture derives the impulse response for a discrete-time system and relates this to the controllability matrix.
See More
Matrix Completion and the Netflix Prize
6 min
Beginner
Video
Theory
This video describes how the singular value decomposition (SVD) can be used for matrix completion and recommender systems.
See More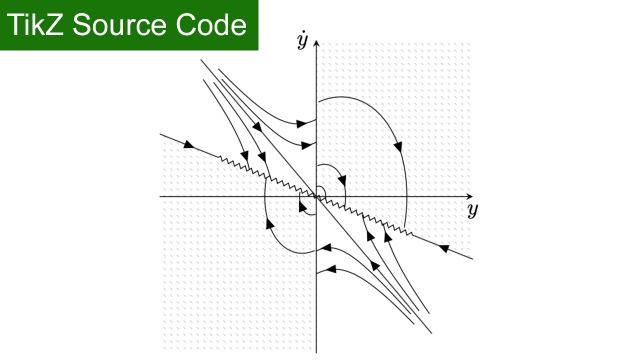
TikZ source Code: Sliding Mode Control Example
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example
See More
Simulating the Lorenz System in Matlab
15 min
Intermediate
Video
Application
This video shows how simple it is to simulate dynamical systems, such as the Lorenz system, in Matlab, using ode45.
See More
Controllability of a Linear System: The Controllability Matrix and the PBH T...
97 min
Beginner
Video
Theory
In this video we explore controllability of a linear system. We discuss two methods to test for controllability, the controllability matrix as well as the P...
See More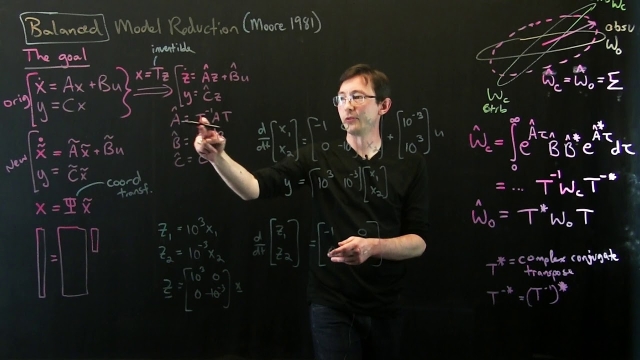
Data-Driven Control: Balancing Example
7 min
Intermediate
Video
Application
In this lecture, we give an example of how a change of coordinates can balance the controllability and observability of an input—output system.
See More![SVD: Eigenfaces 2 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_415.jpg?itok=9rg4zY8s)
SVD: Eigenfaces 2 [Python]
10 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces, in the so-called "eigenfaces" (Python code, part 2).
See More
Discrete control #1: Introduction and overview
22 min
Beginner
Video
Theory
So far I have only addressed designing control systems using the frequency domain, and only with continuous systems. That is, we’ve been working in the S domain with transfer functions. We...
See More![Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_431.jpg?itok=vs89WnA2 "Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart [Control Bootcamp]")
Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart...
13 min
Beginner
Video
Theory
Here we design an optimal full-state feedback controller for the inverted pendulum on a cart example using the linear quadratic regulator (LQR). In Matlab, we find that this is a simple one...
See More
Derivation of the 1D Wave Equation
26 min
Beginner
Video
Theory
In this video, we derive the 1D wave equation. This partial differential equation (PDE) applies to scenarios such as the vibrations of a continuous string. ...
See More
Control Bootcamp: Loop Shaping Example for Cruise Control
12 min
Beginner
Video
Theory
This video demonstrates loop shaping on the cruise control model.
See More
Trimming a Model of a Dynamic System Using Numerical Optimization
60 min
Intermediate
Video
Theory
In this video we show how to find a trim point of a dynamic system using numerical optimization techniques. We generate a cost function that corresponds to a straight and level flight...
See More
Essence of Linear Algebra: Understand the Geomterical Beauty in Linear Algeb...
140 min
Intermediate
Course
Application
Linear Algebra is a very important and fundamental topic needed in almost every field of STEM. While the linear part of it is easy to understand and perform operations on, the geometric...
See More
Particle Filter Explained without Equations
7 min
Beginner
Video
Theory
This video provides a quick graphical introduction to the particle filter. It does a good job building some intuition behind the filter without ever touching on any mathematics. It's worth a...
See More
Frequency domain – tutorial 9: frequency response
23 min
Beginner
Video
Theory
In this video, the learning objectives are to:1- fully understand the frequency response which forms the foundation of filtering 2- quickly review the common...
See More
Fourier Series: Part 1
12 min
Beginner
Video
Theory
This video will show how to approximate a function with a Fourier series, which is an infinite sum of sines and cosines. We will discuss how these sines and cosines form a basis for the...
See More