


Routh-Hurwitz Criterion, An Introduction
12 min
Beginner
Video
Theory
This video gives an introduction into the Routh-Hurwitz Criterion and the Routh Array. I also present a little background information in order to emphasize why the method was developed and...
See More![Controllability, Reachability, and Eigenvalue Placement [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_304.jpg?itok=qj48C5IZ)
Controllability, Reachability, and Eigenvalue Placement [Control Bootcamp]
10 min
Beginner
Video
Theory
This lecture explains the equivalence of controllability, reachability, and the ability to arbitrarily place eigenvalues of the closed loop system.
See More![Randomized SVD Code [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_401.jpg?itok=3jscmfnI)
Randomized SVD Code [Matlab]
9 min
Beginner
Video
Application
This video describes the randomized singular value decomposition (rSVD) (Matlab code).
See More
TikZ source Code: Sliding Mode Control Example System 1
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example System 1
See More
Trimming a Simulink Model Using the Linear Analysis Tool
68 min
Beginner
Video
Application
In this video we show how to use the Linear Analysis Tool to trim a non-linear Simulink model. This is also known as finding an operating point or an equili...
See More
Data-Driven Control: BPOD and Output Projection
5 min
Intermediate
Video
Theory
In this lecture, we introduce the output projection for balancing proper orthogonal decomposition (BPOD), to reduce the number of adjoint simulations required when the number of measurements...
See More![SVD: Eigenfaces 3 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_417.jpg?itok=QFSaPoAT)
SVD: Eigenfaces 3 [Python]
5 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces, in the so-called "eigenfaces" (Python code, part 3).
See More
What Is a Control System and Why Should I Care? (Part 2)
34 min
Beginner
Video
Theory
This talk gives a glimpse of some of the methods and math that allow us to understand feedback systems. Continuing on from Part 1, it gives a description of how we use scientific principles...
See More
Time Domain Analysis: Performance Metrics for a First Order System
78 min
Beginner
Video
Theory
In this video we introduce the concept of time domain analysis for dynamic systems. We examine a first order dynamic system and derive how various performan...
See More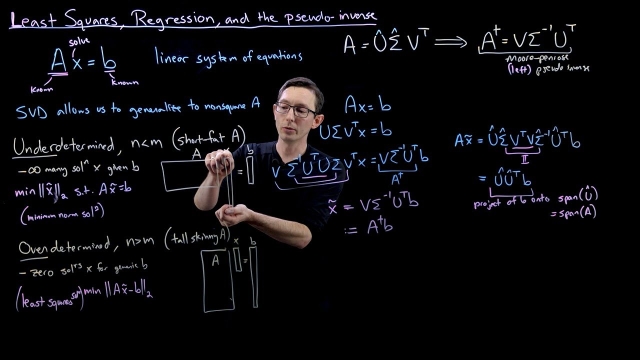
Least Squares Regression and the SVD
5 min
Beginner
Video
Theory
This video describes how the SVD can be used to solve linear systems of equations. In particular, it is possible to solve nonsquare systems (overdetermined or underdetermined) via least...
See More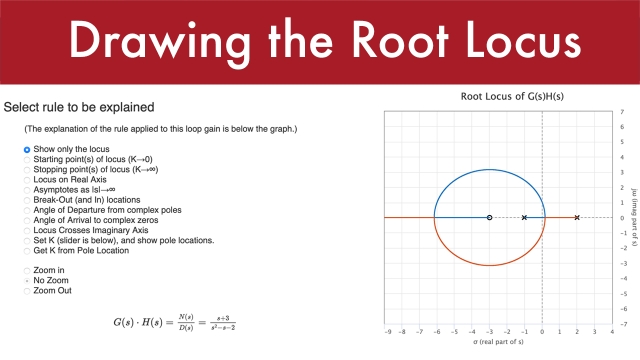
Drawing the root locus (Interactive Tool)
Beginner
App
Theory
This page was developed to help student learn how to sketch the root locus by hand. You can enter a numerator and denominator for G(s)H(s) (i.e., the loop gain) and the program will guide...
See More
Solving the 1D Wave Equation
118 min
Beginner
Video
Theory
In this video, we solve the 1D wave equation. We utilize the separation of variables method to solve this 2nd order, linear, homogeneous, partial differenti...
See More
Machine Learning Control: Genetic Algorithms
13 min
Beginner
Video
Theory
This lecture provides an overview of genetic algorithms, which can be used to tune the parameters of a control law.
See More
Euler (Gimbal Lock) Explained
8 min
Beginner
Video
Theory
In this video we explore Euler Rotations, the most common method for orienting objects in 3d. It's by-product "gimbal lock" can cause headaches for animators because the animated motion can...
See More
Time domain - tutorial 11: system properties from impulse response
13 min
Beginner
Video
Theory
In this video, we learn how to find system properties from the impulse response. Specifically, memoryless, causal, stable and invertible systems will be ful...
See More![Fourier Series [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_362.jpg?itok=VuzjvIsu "Fourier Series [Python]")
Fourier Series [Python]
8 min
Beginner
Video
Application
This video will describe how to compute the Fourier Series in Python.
See More
Velocity & Acceleration in Non-Inertial Reference Frames (Coriolis &...
133 min
Intermediate
Video
Theory
In this video we derive a mathematical description of velocity and acceleration in non-inertial reference frame. We examine the effect of fictitious forces that are witnessed by observers on...
See More
Understanding Model Predictive Control, Part 3: MPC Design Parameters
8 min
Beginner
Video
Theory
To successfully control a system using an MPC controller, you need to carefully select its design parameters. This video provides recommendations for choosing the controller sample time...
See More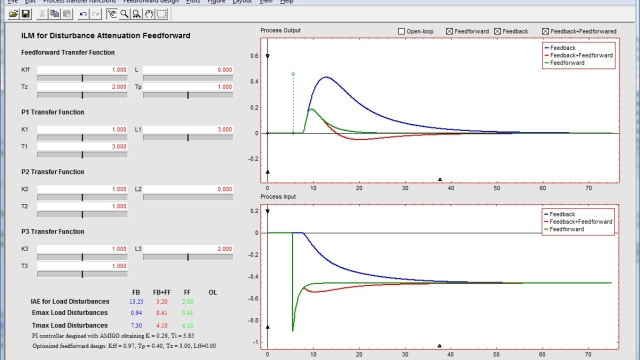
An interactive feedforward tool for FeedForward Control
Beginner
App
Application
This interactive software tool is focused on basic and advanced concepts of feedforward control.
See More
Time domain - tutorial 2: signal representation
2 min
Beginner
Video
Theory
In this video, we review how to represent information as a signal. The information can be anything such as voice (1D) or an image (2D) or even a video (3D). ...
See More
Internal Model Control Example Problem
6 min
Beginner
Video
Theory
I walk through how to design a feedback controller based on a given process transfer function, using Internal Model Control.
See More
Frequency domain – tutorial 4: Gibbs phenomenon
4 min
Beginner
Video
Theory
In this video, we quickly review the Gibbs phenomenon which involves two facts:1) Fourier sums overshoot at a jump discontinuity2) overshoot does not disapp...
See More
Lecture 4: Electromechanical system Transfer functions and Analogous circuit...
31 min
Beginner
Video
Theory

Direct Synthesis Method Numerator Dynamics Problem
10 min
Beginner
Video
Theory
I walk through how to design a PID feedback controller when given a second order process with numerator dynamics, using the Direct Synthesis Method.
See More
Peter Ponders PID - Lead/lag closed loop control
20 min
Beginner
Video
Theory