


RL Course by David Silver - Lecture 2: Markov Decision Process
102 min
Intermediate
Video
Theory
Explores Markov Processes including reward processes, decision processes and extensions.
See More
Transfer Function to State Space
56 min
Beginner
Video
Theory
In this video we show how to transform a transfer function to an equivalent state space representation. We will derive various transformations such as contr...
See More
Lecture 6: Signal Flow Graphs and Mason's Gain Rule
47 min
Beginner
Video
Theory

Control Bootcamp: Sensitivity and Complementary Sensitivity
11 min
Beginner
Video
Theory
Here we explore the sensitivity and complementary sensitivity functions, which are critical in understanding robustness and performance.
See More
TikZ source Code: Switching Manifold
Beginner
Source Code
Application
TikZ source Code: Switching Manifold
See More
Manipulating Aerodynamic Coefficients
25 min
Beginner
Video
Theory
In this video we discuss some potential problems you may encounter when attempting to perform operations with dimensionless aerodynamic coefficients such as ...
See More![Controllability and the PBH Test [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_303.jpg?itok=Q45x3uZ4)
Controllability and the PBH Test [Control Bootcamp]
13 min
Beginner
Video
Theory
This video describes the PBH test for controllability and describes some of the implications for good choices of "B".
See More
Randomized Singular Value Decomposition (SVD)
13 min
Intermediate
Video
Theory
This video describes how to use recent techniques in randomized linear algebra to efficiently compute the singular value decomposition (SVD) for extremely large matrices.
See More
Identifying Dominant Balance Physics from Data - Jared Callaham
12 min
Intermediate
Video
Theory
This video illustrates a new algorithm to identify local dominant physical balance relations from multiscale spatiotemporal data.
See More
Designing a PID Controller Using the Root Locus Method
63 min
Beginner
Video
Theory
In this video we discuss how to use the root locus method to design a PID controller. In addition to discussing the theory, we look at Matlab tools to enabl...
See More
Data-Driven Control: Balancing Transformation
11 min
Intermediate
Video
Theory
In this lecture, we derive the balancing coordinate transformation that makes the controllability and observability Gramians equal and diagonal. This is the critical step in balanced model...
See More![SVD: Eigenfaces 3 [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_416.jpg?itok=hM6yW5WL)
SVD: Eigenfaces 3 [Matlab]
10 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces, in the so-called "eigenfaces" (Matlab code, part 3).
See More
Fuzzy Logic, Part 3: Design and Applications of a Fuzzy Logic Controller
17 min
Beginner
Video
Theory
This video walks you through the process of designing a fuzzy inference system that can balance a pole on a cart. You can design a fuzzy logic controller using just experience and intuition...
See More
Standing Waves Demonstration
44 min
Beginner
Video
Theory
In this video we demonstrate standing waves. We show how the system can be excited by oscillating at specific frequencies to generating standing waves. The...
See More")
Frequency domain – tutorial 13: sampling (theory of everything in signal pro...
25 min
Beginner
Video
Theory
In this video, we learn about sampling which enables us to travel from analog to digital world. The following materials are covered:1) why traveling to the ...
See More
Control Bootcamp: Benefits of Feedback on Cruise Control Example
14 min
Beginner
Video
Theory
Here we investigate the benefits of feedback for systems with uncertain dynamics and disturbances, as illustrated on a cruise control example.
See More
Machine Learning Control: Tuning a PID Controller with Genetic Algorithms
16 min
Beginner
Video
Theory
This lecture shows how to use genetic algorithms to tune the parameters of a PID controller. Tuning a PID controller with genetic algorithms is not generally recommended, but is used to...
See More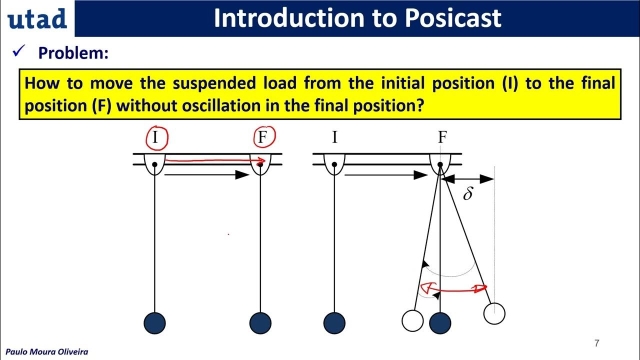
Posicast Control - 1 ( In English)
11 min
Beginner
Video
Theory
This video is an introduction to a learning journey about Posicast Control structured as follows: - Preface - Motivation - Introduction to Posicast Control - Half-Cycle Posicast
See More
Using a Homogeneous Transformation Matrix to Combine Rotation and Translatio...
63 min
Intermediate
Video
Theory
In this video we discuss how to properly deal with coordinate frames that are both rotated and translated from one another. We develop a homogeneous transformation matrix which combines a...
See More
Time domain - tutorial 9: convolution examples
25 min
Beginner
Video
Theory
In this video, we use a systematic approach to solve lots of examples on convolution. By the end of this lecture, you should be able to find convolution betw...
See More
Basic Control Lectures
Beginner
Presentation
Theory
Systems approach, understanding and describing the operation of systems and methods of controlling them are among the basic knowledge of engineering education. But understanding the main...
See More
Understanding Model Predictive Control, Part 7: Adaptive MPC Design with Sim...
8 min
Beginner
Video
Theory
In this video, you will learn how to design an adaptive MPC controller for an autonomous steering vehicle system whose dynamics change with respect to the longitudinal velocity. After you...
See More
Peter Ponders PID-Fuzzy Logic vs PID
10 min
Beginner
Video
Theory
There are many academic and engineering papers showing how good fuzzy logic control is relative to PID control. Every FL vs PID paper I have seen compares...
See More
Routh Stability Criterion Intro and Example
13 min
Beginner
Video
Theory
I introduce and walk through an example problem of how we can use the Routh Stability Criterion to rigorously determine the necessary and sufficient conditio...
See More
Control Bootcamp: Observability
8 min
Beginner
Video
Theory
This video explores the observability of a linear system, namely the ability to estimate the full state "x(t)" from a time-history of limited output measurements "y(t)".
See More