

")
A Nonlinear, 6 DOF Dynamic Model of an Aircraft: the Research Civil Aircraft...
103 min
Beginner
Video
Theory
In this video we develop a dynamic model of an aircraft by describing forces and moments generated by aerodynamic, propulsion, and gravity that act on the ai...
See More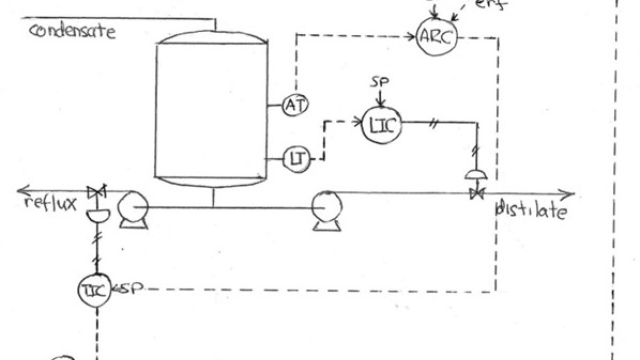

Lecture 19: Lead and PD compensator Design using Root Locus
54 min
Beginner
Video
Theory
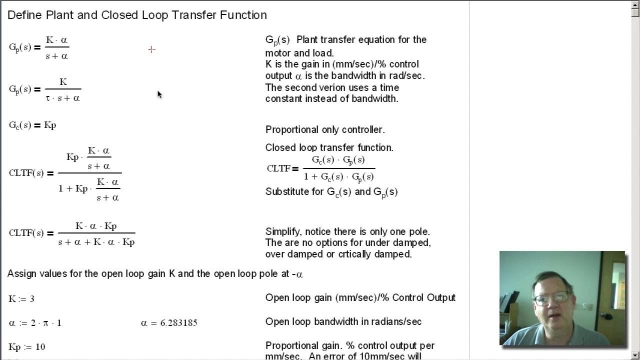
Peter Ponders PID - Controlling non-integrating single pole system. Part 1 ...
10 min
Beginner
Video
Theory
Part 1 shows why P only control shouldn't be used because the set point or target is never reached.Part 2 shows why I only control shouldn't be used because ...
See More
Simulating the Lorenz System in Matlab
15 min
Intermediate
Video
Application
This video shows how simple it is to simulate dynamical systems, such as the Lorenz system, in Matlab, using ode45.
See More
Controllability of a Linear System: The Controllability Matrix and the PBH T...
97 min
Beginner
Video
Theory
In this video we explore controllability of a linear system. We discuss two methods to test for controllability, the controllability matrix as well as the P...
See More
Lecture 14: Routh Hurwitz Criterion
22 min
Beginner
Video
Theory
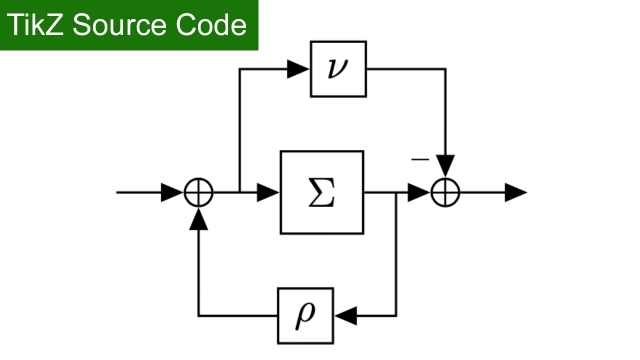
TikZ source Code: Both passivity indices applied
Beginner
Source Code
Application
TikZ source Code: Both passivity indices applied.
See More
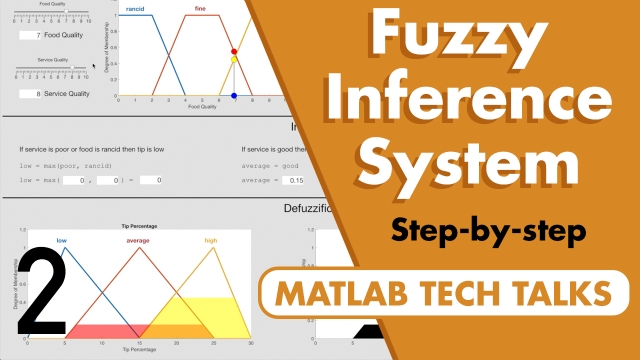
Fuzzy Inference System Walkthrough | Fuzzy Logic Part 2
16 min
Beginner
Video
Theory
This video walks step-by-step through a fuzzy inference system. Learn about concepts like membership function shapes, fuzzy operators, multiple-input inference systems, and rule firing...
See More![Controllability and the Discrete-Time Impulse Response [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_302.jpg?itok=xjXmM9_U)
Controllability and the Discrete-Time Impulse Response [Control Bootcamp]
5 min
Beginner
Video
Theory
This lecture derives the impulse response for a discrete-time system and relates this to the controllability matrix.
See More
Matrix Completion and the Netflix Prize
6 min
Beginner
Video
Theory
This video describes how the singular value decomposition (SVD) can be used for matrix completion and recommender systems.
See More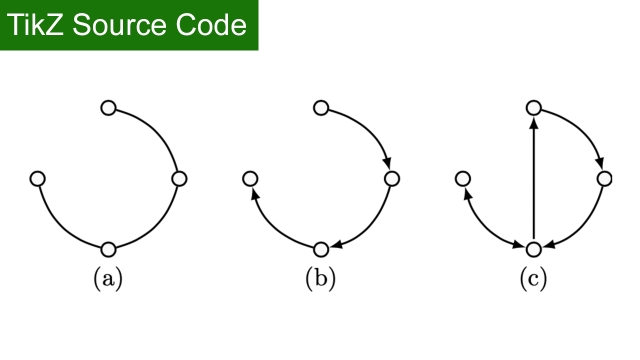
TikZ source Code: Example Graph
Beginner
Source Code
Application
TikZ source Code: Example Graph
See More
Derivation of the 1D Wave Equation
26 min
Beginner
Video
Theory
In this video, we derive the 1D wave equation. This partial differential equation (PDE) applies to scenarios such as the vibrations of a continuous string. ...
See More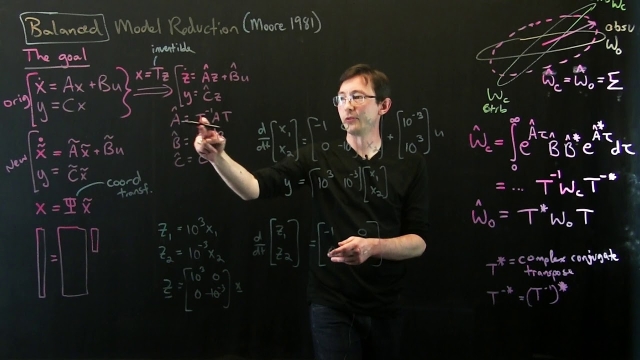
Data-Driven Control: Balancing Example
7 min
Intermediate
Video
Application
In this lecture, we give an example of how a change of coordinates can balance the controllability and observability of an input—output system.
See More![SVD: Eigenfaces 2 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_415.jpg?itok=9rg4zY8s)
SVD: Eigenfaces 2 [Python]
10 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces, in the so-called "eigenfaces" (Python code, part 2).
See More
Frequency domain – tutorial 12: FT of periodic signals
10 min
Beginner
Video
Theory
In this video, we learn how to find the Fourier transform for periodic signals. The following materials are covered:1) relation between Fourier transform and...
See More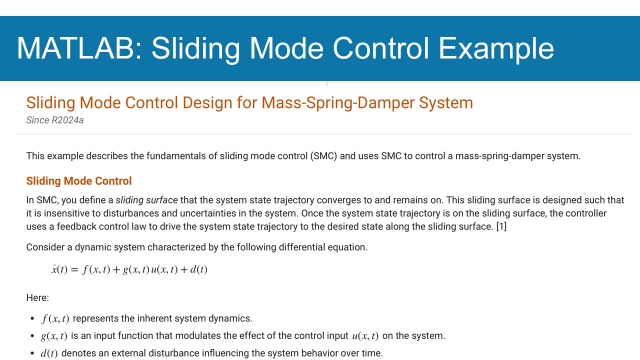
Sliding Mode Control Design for Mass-Spring-Damper System
Intermediate
Example
Application
This MATLAB/Simulink example describes the fundamentals of sliding mode control (SMC) and uses SMC to control a mass-spring-damper system.
See More![Linear Regression 1 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_436.jpg?itok=dYATpI15 "Linear Regression 1 [Python]")
Linear Regression 1 [Python]
6 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for linear regression in Python (part 1).
See More
Dynamic Behavior and Input Types in Process Control
13 min
Beginner
Video
Theory
An introduction to the four types of dynamic behavior and five types of inputs (step, ramp, pulse, impulse, and sinusoidal), and why transfer functions are u...
See More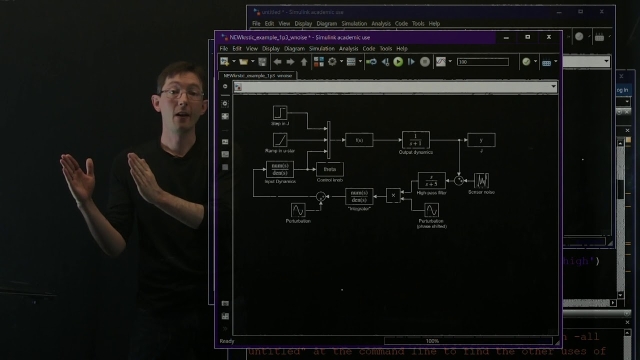
Extremum Seeking Control: Challenging Example
8 min
Intermediate
Video
Theory
This lecture explores the use of extremum-seeking control (ESC) to solve a challenging control problem with a right-half plane zero.
See More
Machine Learning Course by Andrew Ng
1120 min
Beginner
Course
Application
A very comprehensive and detailed course in machine learning , best suited for beginners with knowledge of high school linear mathematics.
See More
Intro to Process Control
6 min
Beginner
Video
Theory
I discuss the motivation and introduce the logic behind controllers that engineers design to respond to errors in outputs (deviations from set points). P and...
See More
Fourier Series: Part 1
12 min
Beginner
Video
Theory
This video will show how to approximate a function with a Fourier series, which is an infinite sum of sines and cosines. We will discuss how these sines and cosines form a basis for the...
See More
Understanding Model Predictive Control, Part 6: How to Design an MPC Control...
9 min
Beginner
Video
Theory
Learn how to design an MPC controller for an autonomous vehicle steering system using Model Predictive Control Toolbox™. This video walks you through the design process of an MPC controller...
See More