

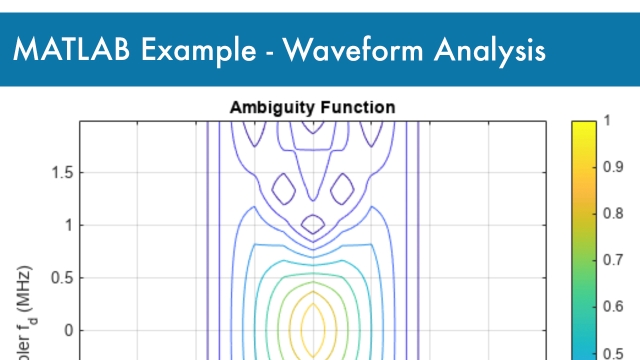
MATLAB Example: Waveform Analysis Using the Ambiguity Function
Intermediate
Example
Application
This example shows how to use the ambiguity function to analyze waveforms. It compares range and Doppler capabilities of several common pulsed waveforms such as the rectangular waveform, the...
See More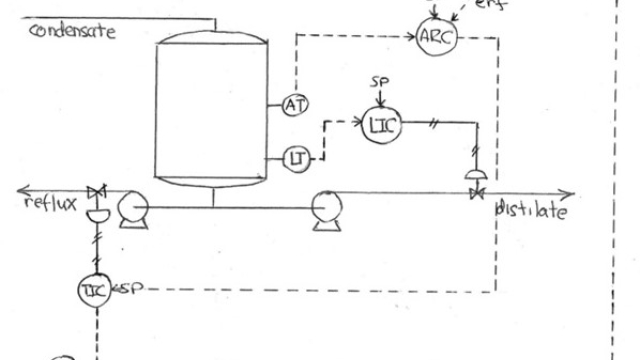
Cascade Control
15 min
Intermediate
Article / Blog
Application
When and how to use Cascade Control
See More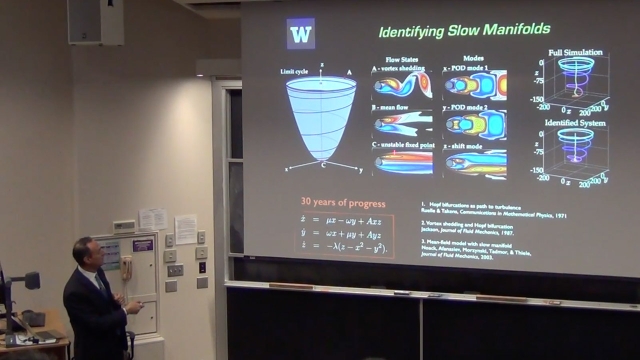
Nathan Kutz:"Data-driven Discovery of Governing Physical Laws"
73 min
Intermediate
Video
Theory
Seminar by Dr.Nathan Kutz on "Data-driven Discovery of Governing Physical Laws" on 10/31/2018 CICS Seminar Series
See More
CS224n: Natural Language Processing with Deep Learning | Winter 2021
Beginner
Course
Theory
This course covers the foundations of the effective modern methods for deep learning applied to NLP, a big picture understanding of human languages and the difficulties in understanding and...
See More
Vectors, Dot Products, Cross Products - 3D Kinematics
50 min
Beginner
Video
Theory
Walter Lewin is one of the most reputed professors and was a former lecturer at MIT. His free to watch series on YouTube titled 8.01 is an excellent one for undergrads and high school...
See More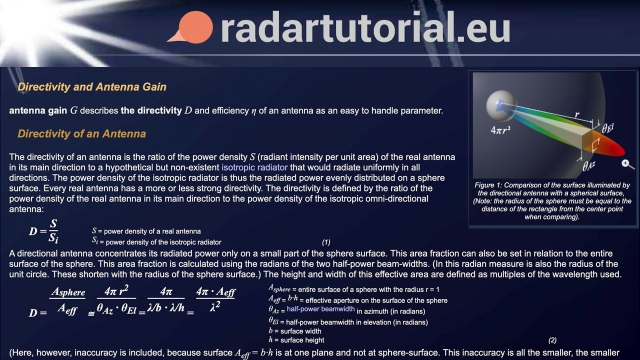
Directivity and Antenna Gain - radartutorial.eu
Beginner
Article / Blog
Theory
This page describes antenna directivity and gain. The directivity of an antenna is the ratio of the power density S (radiant intensity per unit area) of the real antenna in its main...
See More")
Robotic Car - How to read Gyro Datasheets (Part 2)
14 min
Beginner
Video
Theory
Have you ever been lost trying to understand the information in a gyro datasheet? This video should help! In this second part I explain the purpose of a buffer for a MEMS gyro and explain...
See More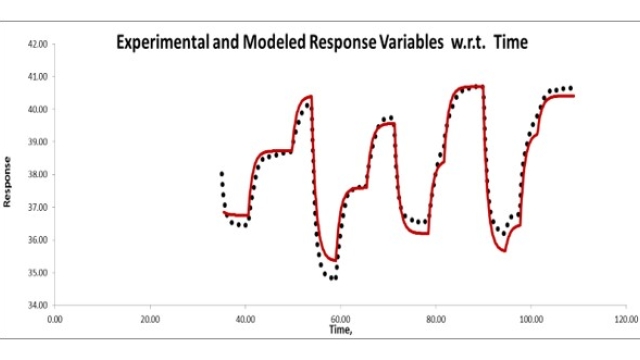
FOPDT Models from Skyline Inputs
20 min
Intermediate
Article / Blog
Application
The classic textbook method to generate FOPDT models is the reaction curve technique, a pre-computer era technique: Start from a steady state, make a step and hold in the controller output...
See More
Control Bootcamp: Overview
19 min
Beginner
Video
Theory
Overview lecture for bootcamp on optimal and modern control. In this lecture, we discuss the various types of control and the benefits of closed-loop feedback control.
See More
System Identification: Dynamic Mode Decomposition with Control
11 min
Intermediate
Video
Theory
This lecture provides an overview of dynamic mode decomposition with control (DMDc) for full-state system identification. DMDc is a least-squares regression technique based on the singular...
See More
OIT System Design Laboratory (Japanese)
Beginner
Video
Demonstration
A collection of video lectures from OIT SDL.
See More
What is a Matched Filter?
10 min
Beginner
Video
Theory
This video explains the Matched Filter from a signals perspective.
See More
Gain Scheduling (Pre-programmed Controller Parameter Adjustment)
Intermediate
Article / Blog
Application
Process gain and time-constants change with operating flow rate, tank levels, temperatures, etc. This often requires re-tuning of the controller coefficient values. However, once done...
See More
Neural Network Overview
7 min
Beginner
Video
Theory
This lecture gives an overview of neural networks, which play an important role in machine learning today.
See More
Basic course of control theory (Hungarian and English)
Beginner
Article / Blog
Theory
The basic course of control theory is taught in the 3rd year for the students specialized in information technology at the Faculty of Electrical Engineering and Informatics of the Budapest...
See More
Autonomous Navigation, Part 6: Metrics for System Assessment
15 min
Beginner
Video
Theory
Take a systems engineering approach to verifying the autonomous navigation system end to end and learn how simulations and physical tests can complement each other. The video also covers a...
See More
Adaptive Control (Part II) —Modeling the X-15’s Adaptive Flight Control Syst...
Intermediate
Article / Blog
Theory
This blog post shows how to build from scratch a Simulink model of the famous MH-96, the X-15's Adaptive Flight Control System
See More
Linear Model Identification Basics
Intermediate
Article / Blog
Application
This is a curated list of Mathworks products, examples, and topics that cover identifying linear models, selecting suitable model structures, constructing and modifying model object...
See More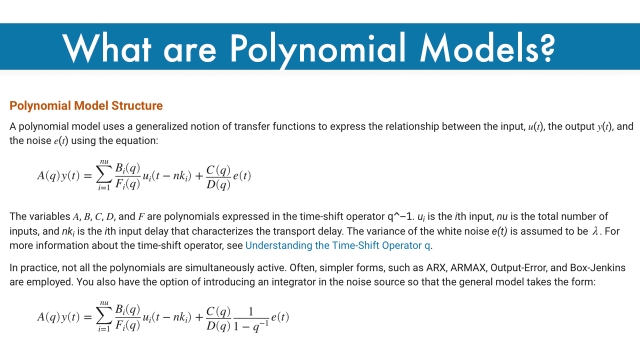
What are Polynomial Models?
Intermediate
Article / Blog
Theory
This Mathworks page provides an overview of polynomial models.
See More
MATLAB Command: lqr
Intermediate
Article / Blog
Application
MATLAB command documentation for the Linear-Quadratic Regulator (lqr) function.
See More
Math Background for Machine Learning from Carnegie Melon University
Beginner
Course
Theory
This course provides a place for students to practice the necessary mathematical background for further study in machine learning — particularly for taking 10-601 and 10-701. Topics covered...
See More
Intro to Data Science: Overview
6 min
Beginner
Video
Theory
This lecture provides an introductory overview to data science. I will discuss the high-level goals of this lecture series, and how data science is about asking and answering questions with...
See More
Singular Value Decomposition (SVD): Overview
6 min
Beginner
Video
Theory
This video presents an overview of the singular value decomposition (SVD), which is one of the most widely used algorithms for data processing, reduced-order modeling, and high-dimensional...
See More![Principal Component Analysis (PCA) 1 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/hqdefault_23.jpg?itok=ugDPjF_z "Principal Component Analysis (PCA) 1 [Python]")
Principal Component Analysis (PCA) 1 [Python]
7 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for principal component analysis (PCA) in Python (part 1).
See More
Gain a better understanding of Root Locus Plots using Matlab
19 min
Beginner
Video
Theory
In this video I go through various ways to use Matlab to plot and visualize the root locus.
See More