

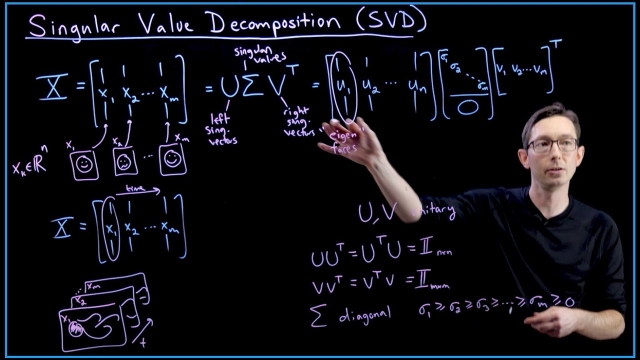
Singular Value Decomposition (SVD): Mathematical Overview
12 min
Intermediate
Video
Theory
This video presents a mathematical overview of the singular value decomposition (SVD).
See More![Unitary Transformations and the SVD [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_428.jpg?itok=YznjC6fr)
Unitary Transformations and the SVD [Python]
6 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) is related to unitary transformations, with Python code.
See More
Sparse Identification of Nonlinear Dynamics for Model Predictive Control
12 min
Intermediate
Video
Theory
This lecture shows how to use sparse identification of nonlinear dynamics with control (SINDYc) with model predictive control to control nonlinear systems purely from data.
See More
Trimming a Model of a Dynamic System Using Numerical Optimization
60 min
Intermediate
Video
Theory
In this video we show how to find a trim point of a dynamic system using numerical optimization techniques. We generate a cost function that corresponds to a straight and level flight...
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 13 - Fast Rei...
79 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

RL Course by David Silver - Lecture 9: Exploration and Exploitation
99 min
Intermediate
Video
Theory
An overview of multi-armed bandits, contextual bandits and Markov Decision Processes.
See More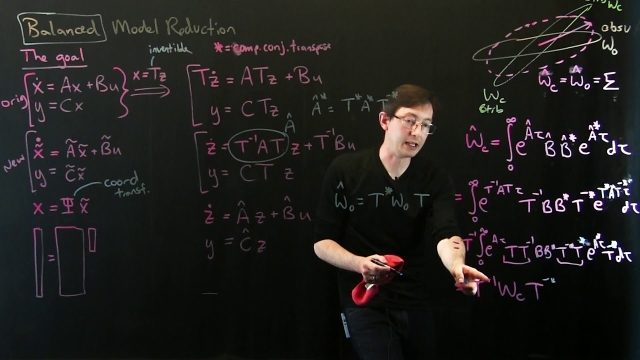
Data-Driven Control: Change of Variables in Control Systems (Correction)
2 min
Intermediate
Video
Theory
This video corrects a typo in the previous lecture.
See More
Complex Fourier Series
12 min
Intermediate
Video
Theory
This video will describe how the Fourier Series can be written efficiently in complex variables.
See More![SVD: Eigenfaces 1 [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_412.jpg?itok=X4iw3jz2)
SVD: Eigenfaces 1 [Matlab]
7 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces, in the so-called "eigenfaces" (Matlab code, part 1).
See More
Simulating the Lorenz System in Matlab
15 min
Intermediate
Video
Application
This video shows how simple it is to simulate dynamical systems, such as the Lorenz system, in Matlab, using ode45.
See More
Controls Engineering in the FIRST Robotics Competition
Intermediate
Book
Application
This guide is intended to make an advanced engineering topic approachable so it can be applied by those who aren’t experts in control theory. The intended audience is high school students...
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 7 - Imitation...
73 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
See More
Data-Driven Control: Error Bounds for Balanced Truncation
11 min
Intermediate
Video
Theory
In this lecture, we derive error bounds for the balanced truncation.
See More")
Koopman Spectral Analysis (Overview)
27 min
Intermediate
Video
Theory
In this video, we introduce Koopman operator theory for dynamical systems. The Koopman operator was introduced in 1931, but has experienced renewed interest recently because of the...
See More![SVD: Eigenfaces 3 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_417.jpg?itok=QFSaPoAT)
SVD: Eigenfaces 3 [Python]
5 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces, in the so-called "eigenfaces" (Python code, part 3).
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 5 - Value Fun...
82 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
See More
Velocity & Acceleration in Non-Inertial Reference Frames (Coriolis &...
133 min
Intermediate
Video
Theory
In this video we derive a mathematical description of velocity and acceleration in non-inertial reference frame. We examine the effect of fictitious forces that are witnessed by observers on...
See More
RL Course by David Silver - Lecture 3: Planning by Dynamic Programming
99 min
Intermediate
Video
Theory
Introduces policy evaluation and iteration, value iteration, extensions to dynamic programming and contraction mapping.
See More
Override and Reset Feedback
15 min
Intermediate
Article / Blog
Application
Override (Select, Safety, Switch) control observes an auxiliary variable and takes over from the primary controller when a limit is exceeded. Reset feedback is a method to prevent the non...
See More
Data-Driven Control: Balanced Truncation and BPOD Example
11 min
Intermediate
Video
Application
In this lecture, we explore balanced truncation and BPOD on a numerical example in Matlab.
See More
Sliding Mode Control Design for a Robotic Manipulator
Intermediate
Example
Application
This MATLAB/Simulink example shows how to design a controller for a robotic manipulator with two actuated joints using sliding mode control (SMC). SMC is useful for systems that require...
See More
Singular Value Decomposition (SVD): Dominant Correlations
11 min
Intermediate
Video
Theory
This lectures discusses how the SVD captures dominant correlations in a matrix of data.
See More![Unitary Transformations and the SVD [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_427.jpg?itok=FrsjRsfe)
Unitary Transformations and the SVD [Matlab]
11 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) is related to unitary transformations, with Matlab code.
See More![Linear Regression 3 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_438.jpg?itok=rU8HcFY_ "Linear Regression 3 [Python]")
Linear Regression 3 [Python]
10 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for linear regression in Python (part 3).
See More
Bode Plot Drawing Tool
Intermediate
Article / Blog
Demonstration
This page demonstrates the techniques described previously to take a transfer function defined by the user, identify the constituent terms, draw the individual Bode plots, and then combine...
See More