


Vectors, Dot Products, Cross Products - 3D Kinematics
50 min
Beginner
Video
Theory
Walter Lewin is one of the most reputed professors and was a former lecturer at MIT. His free to watch series on YouTube titled 8.01 is an excellent one for undergrads and high school...
See More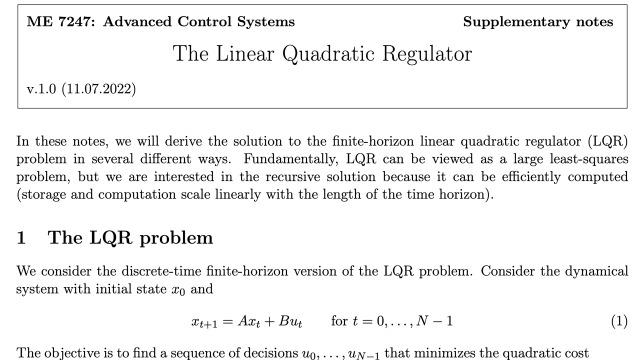
The Linear Quadratic Regulator
Beginner
Article / Blog
Theory
In these notes, we will derive the solution to the finite-horizon linear quadratic regulator (LQR) problem in several different ways. Fundamentally, LQR can be viewed as a large least...
See More
Systems Engineering, Part 3: The Benefits of Functional Architectures
14 min
Beginner
Video
Theory
Functional, logical, and physical architectures are important tools for designing complex systems. We describe what architectures are and how they contribute to the early stages of a project...
See More
Introduction to Radar Systems: Target Radar Cross Section
Beginner
Presentation
Theory
This course is presented by Robert M. O'Donnell, a former researcher at MIT Lincoln Laboratory, and is designed to instill a basic working knowledge of radar systems.
The set of 10 lectures...
See More
So You Want to be a Systems Engineer
53 min
Beginner
Video
Theory
A presentation by Gentry Lee on what qualities and characteristics make a great systems engineer. At the time of the presentation, Gentry Lee was the Chief Engineer for the Solar System...
See More
Passivity-Based Control to Guarantee Stability | Control Systems in Practice...
15 min
Beginner
Video
Theory
Learn about passivity-based control to guarantee closed-loop stability of feedback systems. Consider different ways to assess the stability of systems other than looking at gain and phase...
See More
Video Lectures on Automatic Control
Beginner
Video
Theory
A collection of 32 video lectures on automatic control by Dr. Rajesh Joseph Abraham.
See More
Regulatory PID (Polish)
18 min
Beginner
Video
Theory
W tym odcinku, opisze wam podstawy działania regulatorów PID.
See More![The Kalman Filter [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_382.jpg?itok=BhYaUiZA "The Kalman Filter [Control Bootcamp]")
The Kalman Filter [Control Bootcamp]
6 min
Beginner
Video
Theory
Here, we discuss the Kalman Filter, which is an optimal full-state estimator, given Gaussian white noise disturbances and measurement noise.
See More
Robotic Car - A Simple Way to Build a Model
15 min
Beginner
Video
Theory
You don't always have to work out the math in order to build up a model of your system. Sometimes generating a model is as easy as running a simple test and inspecting the results. I show...
See More
Computing Euler Angles: Tracking Attitude Using Quaternions
74 min
Beginner
Video
Theory
In this video we continue our discussion on how to track the attitude of a body in space using quaternions. The quaternion method is similar to the Euler Ki...
See More
Fast chirp FMCW Radar in automotive applications
Advanced
Peer Reviewed Paper
Theory
FMCW (frequency-modulated continuous wave radar) modulations have been popularly implemented in the automotive radar applications. This document demonstrates system requirement for a new...
See More
PID Explained
20 min
Beginner
Article / Blog
Theory
A qualitative explanation of P, I, & D actions using graphs.
See More
Robust Control, Part 3: Disk Margins for MIMO Systems
16 min
Beginner
Video
Theory
This video shows how margin can be used to assess the robustness of multi-input, multi-output systems. We’ll show how disk margin is a more complete way to represent margin for MIMO systems...
See More
Sprint - Test Flight 8 and Data Review
17 min
Beginner
Video
Application
This video is part of a series that details the design, build, and test of Sprint - a thrust vector controlled model rocket by Joe Barnard of BPS Space.
See More
Intro to Data Science: Answering Questions with Data
6 min
Beginner
Video
Theory
This lecture describes the central aspect of data science: asking and answering questions with data. In particular, we discuss the thought process and progression of questions one might ask...
See More
A simple MEMS gyro model using MATLAB / Simulink
16 min
Beginner
Video
Theory
This video walks through how to model a simple MEMS gyroscope using MATLAB/Simulink. At the end I show you how to linearize this model to use in your linear control loop design and analysis.
See More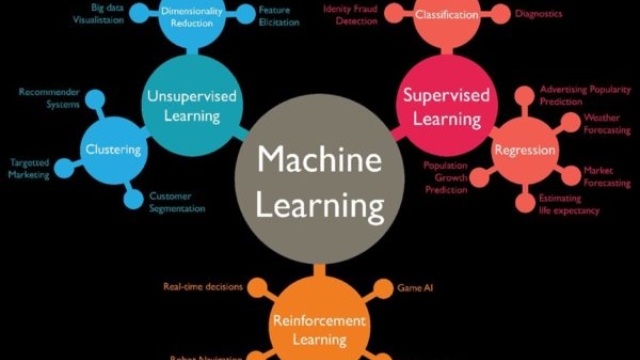
An Artificial Intelligence Primer
15 min
Beginner
Article / Blog
Theory
This blog post is a great primer providing definitions for basic terms used in AI and machine learning (ML) such as supervised learning, unsupervised learning, and transfer learning...
See More
Understanding Control Systems (Playlist)
Beginner
Video
Theory
Learn the basic concepts behind controls systems. Walk through everyday examples that outline fundamental ideas, and explore open-loop and feedback control systems. These videos explore open...
See More
Basic course of control theory (Hungarian and English)
Beginner
Article / Blog
Theory
The basic course of control theory is taught in the 3rd year for the students specialized in information technology at the Faculty of Electrical Engineering and Informatics of the Budapest...
See More
Control Bootcamp: Introduction to Robust Control
8 min
Beginner
Video
Theory
This video motivates robust control with the famous 1978 paper by John Doyle, titled "Guaranteed Margins for LQG Regulators"... Abstract: There are none.
See More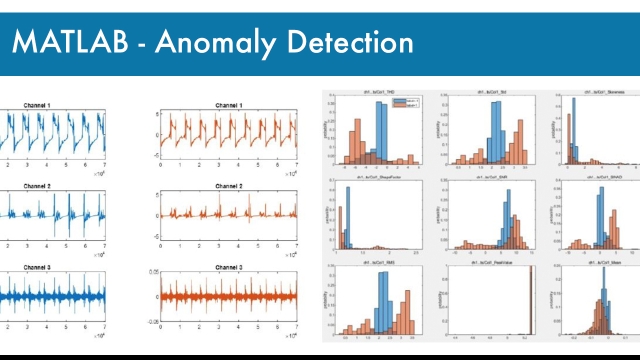
MATLAB Discovery Page - Anomaly Detection
Beginner
Article / Blog
Theory
Anomaly detection is the process of identifying events or patterns that differ from expected behavior. Anomaly detection can range from simple outlier detection to complex machine learning...
See More
My Sole Advise to Data Scientists on Coursera & Quora
Beginner
Article / Blog
Theory
This blog post by Tarry Singh answers questions including "How do I get started in the field on Machine Learning, Deep Learning or Artificial Intelligence" and "How do I advance from the...
See More
Robust Control, Part 4: Working with Parameter Uncertainty
13 min
Beginner
Video
Theory
The previous two videos showed a few different ways to quantify how robust a system is to model and plant uncertainty by looking at how much input and output variation it can handle before...
See More
Online and Recursive System Identification | System Identification, Part 4
19 min
Beginner
Video
Theory
Online system identification algorithms estimate the parameters and states of a model as new data is measured and available in real-time or near real-time. Brian Douglas covers what online...
See More