


Resonance in Nature and Bioinspired Squid Robots
18 min
Beginner
Video
Demonstration
Bioinspired robots combine the best of both biology and engineering. Using tools learned from nature, we can build squid-like and other squishy robots to improve current capabilities in...
See More
Trimming and Linearization, Part 1: What is Linearization?
14 min
Beginner
Video
Theory
Why go through the trouble of linearizing a model? To paraphrase Richard Feynman, it’s because we know how to solve linear systems. With a linear model we can more easily design a controller...
See More
A real control system - how to start designing
26 min
Beginner
Video
Application
Let’s design a control system the way you might approach it in a real situation rather than an academic one. In this video, I step through a control problem and show how control theory is...
See More
MATLAB toolbox for control 101 course
Beginner
Software
Theory
Community toolbox project led by Anthony Rossiter and sponsored by MathWorks. The project incorporates input from various international collaborators. The aim is to make the developed...
See More
Discrete control #2: Discretize! Going from continuous to discrete domain
24 min
Beginner
Video
Theory
This is the second video in the discrete control series. It focuses on discretizing a continuous system - getting to the z-domain from the s-domain.
See More
Neural Network Overview
7 min
Beginner
Video
Theory
This lecture gives an overview of neural networks, which play an important role in machine learning today.
See More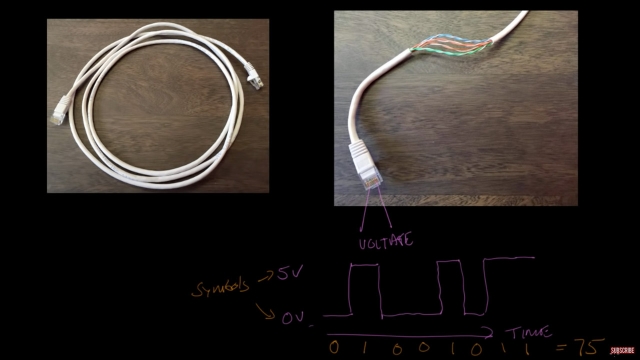
Sending digital information over a wire | Networking tutorial (1 of 13)
4 min
Beginner
Video
Theory
This video lecture is the beginning of an exploration of computer networking with the basics of sending digital information with a copper wire.
Model Reference Adaptive Control Fundamentals (Dr. Tansel Yucelen)
91 min
Beginner
Video
Theory
Forum on Robotics & Control Engineering (FoRCE, http://force.eng.usf.edu/) Seminar Series: "Model Reference Adaptive Control Fundamentals" (Dr. Tansel Yucelen)
See More
Nyquist Stability Criterion
15 min
Beginner
Article / Blog
Theory
The Wikipedia article on Nyquist Stability Criterion. This covers the Nyquist plot, the Cauchy argument principle, and the stability criterion itself. A mathematical derivation is also...
See More
A* Pathfinding (E01: algorithm explanation)
12 min
Beginner
Video
Theory
Welcome to the first part in a series teaching pathfinding for video games. In this episode we take a look at the A* algorithm and how it works.
See More
Passivity-Based Control to Guarantee Stability | Control Systems in Practice...
15 min
Beginner
Video
Theory
Learn about passivity-based control to guarantee closed-loop stability of feedback systems. Consider different ways to assess the stability of systems other than looking at gain and phase...
See More
Control Systems in Practice, Part 5: A Better Way to Think About a Notch Fil...
13 min
Beginner
Video
Theory
This video describes an intuitive way to approach notch filter design by thinking about the problem as an inverted, lightly damped, second-order low-pass filter. Then, two additional poles...
See More
Why Do Radars Chirp? | Pulse Waveform Basics
Beginner
Video
Theory
This tech talk covers how different pulse waveforms affect radar and sonar performance. See the difference between a rectangular pulse and a linear frequency modulated pulse, as well as...
See More
Video Lectures on Automatic Control
Beginner
Video
Theory
A collection of 32 video lectures on automatic control by Dr. Rajesh Joseph Abraham.
See More
Radar Systems Engineering Lecture 4: The Radar Equation
Beginner
Presentation
Theory
This Free Radar Systems Engineering Course (video, audio and screen captured ppt slides) and separate pdf slides) has been developed as a first course in Radar Systems for first year...
See More
Regulatory PID (Polish)
18 min
Beginner
Video
Theory
W tym odcinku, opisze wam podstawy działania regulatorów PID.
See More
The Braitenberg Vehicles
15 min
Beginner
Video
Theory
This video explores the world of simple logical robots as described by Valentino Braitenberg in his book Vehicles, Experiments in Synthetic Psychology. With very simple linkages between...
See More
Extremum Seeking Control
18 min
Beginner
Video
Theory
This lecture provides an overview of extremum-seeking control (ESC), which is an adaptive equation free method of controlling nonlinear systems. A sinusoidal perturbation is added to the...
See More
Feedback in the Squishy Stuff: Introducing Chemical and Biological Process ...
29 min
Beginner
Video
Demonstration
Feedback doesn’t just happen in robots and self-driving cars, but in the regulation of our very bodies and in the ways in which we transform raw ingredients into materials we can use, be...
See More![Linearizing Around a Fixed Point [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_442.jpg?itok=nt2vg0vl "Linearizing Around a Fixed Point [Control Bootcamp]")
Linearizing Around a Fixed Point [Control Bootcamp]
30 min
Beginner
Video
Theory
This lecture describes how to obtain linear system of equations for a nonlinear system by linearizing about a fixed point. This is worked out for the simple pendulum "by-hand" and in...
See More
Introduction to Anomaly Detection for Engineers
15 min
Beginner
Video
Theory
Anomaly detection is the process of identifying events or patterns that differ from expected behavior. This is important for applications like predictive maintenance but can be hard to...
See More
An Artificial Intelligence Primer
15 min
Beginner
Article / Blog
Theory
This blog post is a great primer providing definitions for basic terms used in AI and machine learning (ML) such as supervised learning, unsupervised learning, and transfer learning...
See More
Simulink Onramp
120 min
Beginner
Tutorial
Demonstration
Learn the basics of how to create, edit, and simulate models in Simulink®. Use block diagrams to represent real-world systems and simulate components and algorithms.
See More
Understanding Control Systems (Playlist)
Beginner
Video
Theory
Learn the basic concepts behind controls systems. Walk through everyday examples that outline fundamental ideas, and explore open-loop and feedback control systems. These videos explore open...
See More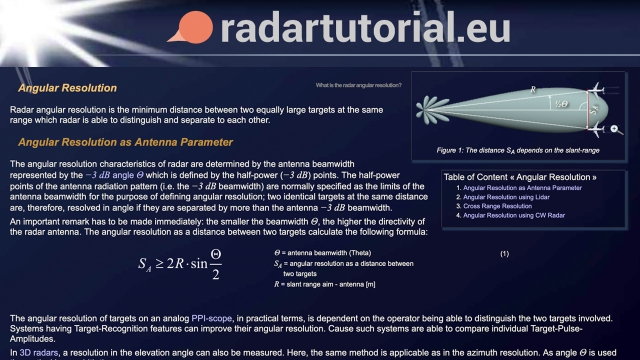
Radar Angular Resolution
Beginner
Article / Blog
Theory
This radartutorial.eu page describes angular resolution. Radar angular resolution is the minimum distance between two equally large targets at the same range which radar is able to...
See More