


Predicting Second Order Transfer Function Behavior
4 min
Beginner
Video
Theory
Given a second order transfer function, I'll cover how we can predict the system behavior and derive the appropriate time constants and damping coefficient.
See More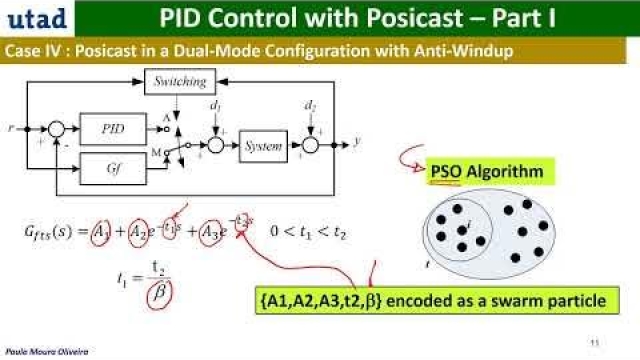
PID Control with Posicast 7 - ( In English )
12 min
Beginner
Video
Theory
In this video closed-loop configurations with PID controllers and Posicast are introduced.
See More
Standard 2nd Order ODEs: Natural Frequency and Damping Ratio
94 min
Beginner
Video
Theory
In this video we discuss writing 2nd order ODEs in standard form xdd(t)+2*zeta*wn*xd(t)+wn^2*x(t)where zeta = damping ratio wn = natural ...
See More
Setting Up Your Radio Connection - dRehmFlight VTOL
4 min
Beginner
Video
Application
This video will show you how to set up your radio to work with dRehmFlight VTOL. The code supports PWM, PPM, and SBUS type receivers, allowing you to connect and use 6 channels within the...
See More
Euler Angles and the Euler Rotation Sequence
70 min
Beginner
Video
Theory
In this video we discuss how Euler angles are used to define the relative orientation of one coordinate frame to another.Topics and Timestamps:0:00 – Introd...
See More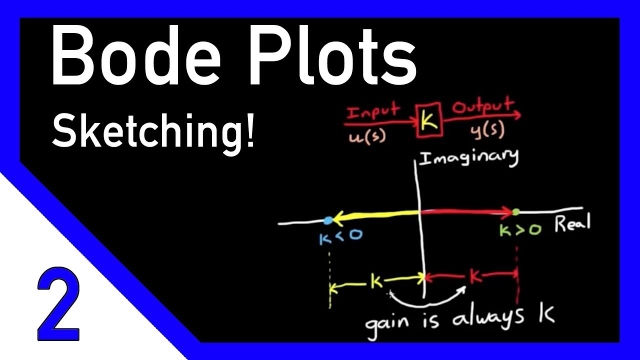
Bode Plots by Hand: Real Constants
8 min
Beginner
Video
Theory
This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a simple transfer function; a real constant.
See More
Understanding The Sensitivity Function
13 min
Beginner
Video
Theory
In this video I explain the sensitivity function and try to demystify the equation used to solve for the nominal sensitivity peak. Sensitivity describes how much process variations affect...
See More
Using ‘minreal’ in Matlab to Perform Transfer Function Pole/Zero Cancellatio...
18 min
Beginner
Video
Application
In this tutorial we look at using the ‘minreal’ function in Matlab to perform pole/zero cancellation from transfer functions.Topics and time stamps:(0:10) – ...
See More
Peter Ponders PID - KalmanFilters, Alpha-Beta-Gamma filters
16 min
Beginner
Video
Theory

Resonant Frequency of a Dynamic System
29 min
Beginner
Video
Theory
In this video we discuss the resonant frequency of a dynamic system. We show how the resonant frequency, natural frequency, and damped natural frequency are...
See More
Lecture 17: Introduction to Compensators/Controllers
35 min
Beginner
Video
Theory

Peter Ponders PID - System Identification Advanced
19 min
Beginner
Video
Theory
Extremum Seeking Control in Simulink
26 min
Beginner
Video
Application
This lecture explores extremum-seeking control (ESC) on a simple example in Matlab’s Simulink.
See More
Solving the 1D Heat Equation
47 min
Beginner
Video
Theory
In this video we simplify the general heat equation to look at only a single spatial variable, thereby obtaining the 1D heat equation. We solving the result...
See More
Designing a Lag Compensator with Bode Plot
13 min
Beginner
Video
Theory
This video walks through a phase lag compensator example using the Bode Plot method.
See More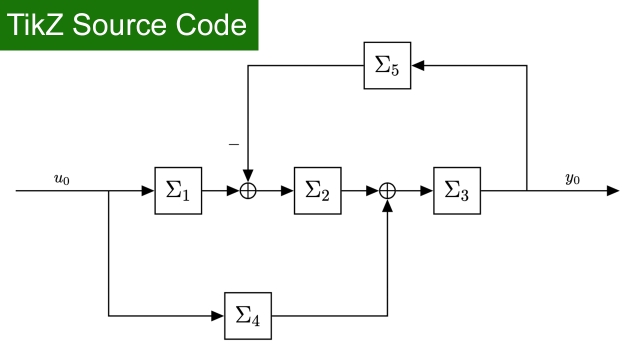
TikZ source Code: Nested subsystems
Beginner
Source Code
Application
TikZ source Code: Nested subsystems
See More
Basic Control Lectures
Beginner
Presentation
Theory
Systems approach, understanding and describing the operation of systems and methods of controlling them are among the basic knowledge of engineering education. But understanding the main...
See More
Time domain - tutorial 11: system properties from impulse response
13 min
Beginner
Video
Theory
In this video, we learn how to find system properties from the impulse response. Specifically, memoryless, causal, stable and invertible systems will be ful...
See More![SVD: Importance of Alignment [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_421.jpg?itok=xDlrjOXt)
SVD: Importance of Alignment [Matlab]
6 min
Beginner
Video
Application
This video describes the importance of aligning data when using the singular value decomposition (SVD) (Matlab code).
See More
Understanding Sensor Fusion and Tracking, Part 2: Fusing a Mag, Accel, and G...
16 min
Beginner
Video
Theory
This video describes how we can use a magnetometer, accelerometer, and a gyro to estimate an object’s orientation. The goal is to show how these sensors contribute to the solution, and to...
See More
TikZ source Code: Sliding Mode Control Example
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example
See More
Lecture 4: Electromechanical system Transfer functions and Analogous circuit...
31 min
Beginner
Video
Theory

Time domain - tutorial 2: signal representation
2 min
Beginner
Video
Theory
In this video, we review how to represent information as a signal. The information can be anything such as voice (1D) or an image (2D) or even a video (3D). ...
See More
Control Bootcamp: Loop shaping
7 min
Beginner
Video
Theory
This video explores shaping the loop transfer function to have desirable sensitivity and complementary sensitivity.
See More
Why Transfer Functions Matter
5 min
Beginner
Video
Theory
Once we know a process's transfer function we can model how it will respond to an variety of inputs very easily, check it out.
See More