
A proportional–integral–derivative controller (PID controller or three-term controller) is a control loop mechanism employing feedback that is widely used in industrial control systems and a variety of other applications requiring continuously modulated control. A PID controller continuously calculates an error value, e(t), as the difference between a desired setpoint (SP) and a measured process variable (PV) and applies a correction based on proportional, integral, and derivative terms (denoted P, I, and D respectively), hence the name.
Topic
Proportional-Integral-Derivative (PID) Controller
This topic includes the following resources and journeys:
Filters
Type
Experience
Scope
36 items

Understanding PID Control, Part 1: What is PID Control?
11 min
Beginner
Video
Theory
Chances are you’ve interacted with something that uses a form of this control law, even if you weren’t aware of it. That’s why it is worth learning a bit more about what this control law is...
See More
Understanding PID Control, Part 5: Three Ways to Build a Model
13 min
Beginner
Video
Theory
Tuning a PID controller requires that you have a representation of the system you’re trying to control. This could be the physical hardware or a mathematical representation of that hardware...
See More
Understanding PID Control, Part 7: Important PID Concepts
12 min
Beginner
Video
Theory
Now that you ’ve gotten an overview of PID tuning techniques, this video moves on to discussing two important concepts in PID control: cascaded loops and discrete systems. Both concepts are...
See More
Understanding PID Control, Part 4: A PID Tuning Guide
12 min
Beginner
Video
Theory
It can be difficult to navigate all the resources that promise to explain the secrets of PID tuning. Some proclaim that PID tuning is an art that requires finesse and experience, while...
See More
Understanding PID Control, Part 6: Manual and Automatic Tuning Methods
13 min
Beginner
Video
Theory
The previous video showed three different approaches to developing a mathematical model of your physical system. Now that we have this model, we can use it to tune a PID controller that will...
See More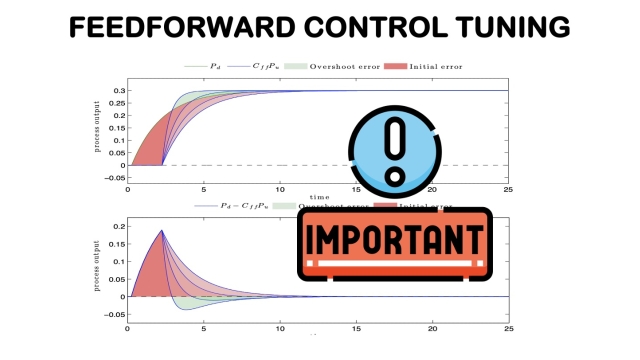
Advances in feedforward control for measurable disturbances
35 min
Intermediate
Video
Theory
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See More
Advances in feedforward control for measurable disturbances (in Spanish)
60 min
Intermediate
Video
Theory
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See More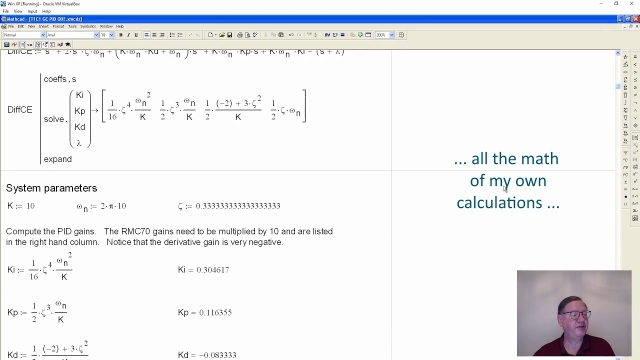
Peter Ponders PID - Introduction
3 min
Beginner
Video
Theory
The purpose of this video is to inform the viewer about what to expect. My videos go much deeper than the typical videos. They are geared for graduate st...
See More
Regulatory PID (Polish)
18 min
Beginner
Video
Theory
W tym odcinku, opisze wam podstawy działania regulatorów PID.
See More
PID Controller Implementation in Software
20 min
Intermediate
Video
Application
How to implement a PID controller in software using C, discussing theory and practical considerations. Demonstration of PID controller code using a custom flight simulator.
See More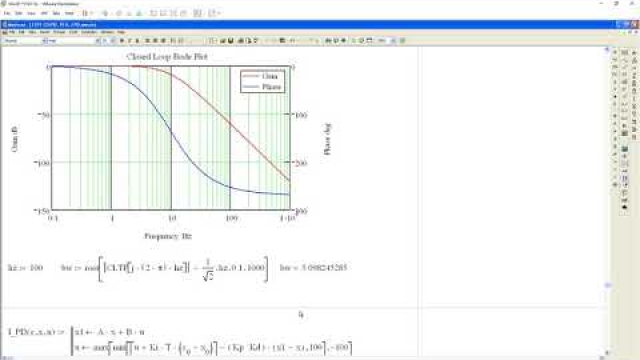
Peter Ponders PID - Closed Loop Zeros
13 min
Beginner
Video
Theory
This video covers closed loop zeros, what causes zeros and the benefits and drawbacks of closed loop zeros.
See More
Simple Examples of PID Control
13 min
Beginner
Video
Theory
In this video I continue the topic of PID control. We walk through a simple control system and visualize how each of the three paths, P, I, and D, all address specific problems that arise...
See More
Peter Ponders PID - Cascade Control Part2
14 min
Beginner
Video
Theory
The inner loop pole locations and gains are calculated first so the inner loop pole locations are determined by the user. The outer loop poles are still pla...
See More
Peter Ponders PID - Controlling a non-integrating single pole system. Part 3...
9 min
Beginner
Video
Theory
Part 3 uses PI control which is the only practical means of control a non-integrating single pole system.http://deltamotion.comhttp://forum.deltamotion.com
See More
Direct Synthesis Method Numerator Dynamics Problem
10 min
Beginner
Video
Theory
I walk through how to design a PID feedback controller when given a second order process with numerator dynamics, using the Direct Synthesis Method.
See More
PID Control - A brief introduction
7 min
Beginner
Video
Theory
In this video, I introduce the topic of PID control. This is a short introduction design to prepare you for the next few lectures where I will go through several examples of PID control....
See More
Peter Ponders PID - IAE,ITAE,ISE Performance indicators
17 min
Beginner
Video
Theory
Performance indicators can be used to compute closed loop pole locations. Only one gain parameter is required to move the pole locations closer to the origi...
See More
Understanding PID Control, Part 3: Expanding Beyond a Simple Derivative
11 min
Beginner
Video
Theory
This video describes how to make an ideal PID controller more robust when controlling real systems that don’t behave like ideal linear models. Noise is generated by sensors and is present in...
See More
Peter Ponders PID - Controlling non-integrating single pole system. Part 1 ...
10 min
Beginner
Video
Theory
Part 1 shows why P only control shouldn't be used because the set point or target is never reached.Part 2 shows why I only control shouldn't be used because ...
See More
Cascade Control Intro
8 min
Beginner
Video
Theory
How can we improve the disturbance rejection of our controllers using additional, relevant measurements? Tune in to find out!
See More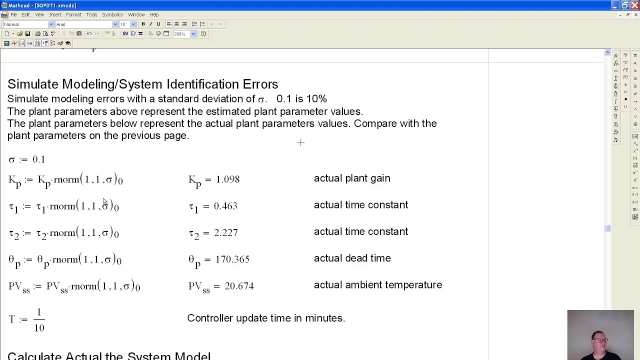
Peter Ponders PID. Second Order Plus Dead Time , SOPDT, Temperature Control,...
12 min
Beginner
Video
Theory
In this video I derive the equations for the controller gains and a low pass filter for a SOPDT system with a very long dead time To make the simulation mo...
See More control")
Control Bootcamp: Cruise Control Example with Proportional-Integral (PI) co...
23 min
Beginner
Video
Theory
In this video, we show that introducing integral control reduces the steady-state tracking error to zero in the cruise control example. We also use a more sophisticated model for the...
See More
Designing a PID Controller Using the Ziegler-Nichols Method
33 min
Beginner
Video
Theory
In this video we discuss how to use the Ziegler-Nichols method to choose PID controller gains. In addition to discussing the method and providing a Matlab i...
See More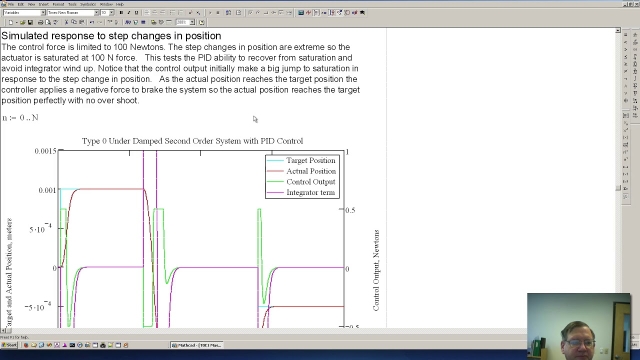
Peter Ponders PID - Controlling an Under Damp Mass and Spring System
24 min
Beginner
Video
Theory
Demonstrates:How to calculate the PID gains. The importance of the derivative gain. How to simulate the mass and spring systemControl limitations based on s...
See More
Understanding PID Control, Part 2: Expanding Beyond a Simple Integral
10 min
Beginner
Video
Theory
The first video in this series described a PID controller, and it showed how each of the three branches help control your system.That seemed simple enough and appeared to work. However, in...
See More