
A proportional–integral–derivative controller (PID controller or three-term controller) is a control loop mechanism employing feedback that is widely used in industrial control systems and a variety of other applications requiring continuously modulated control. A PID controller continuously calculates an error value, e(t), as the difference between a desired setpoint (SP) and a measured process variable (PV) and applies a correction based on proportional, integral, and derivative terms (denoted P, I, and D respectively), hence the name.
Topic
Proportional-Integral-Derivative (PID) Controller
This topic includes the following resources and journeys:
Filters
Type
Experience
Scope
3 items
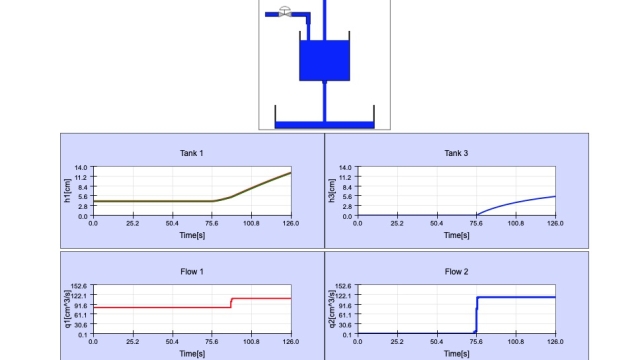
Virtual Lab for a Two-tanks system
Beginner
Virtual Lab
Application
This is a virtual lab for a two-tank system that can be used for modelling and control learing/teaching purposes. Open-loop tests and closed-loop simulatons based on PI control or PI plus...
See More
Experimental evaluation of feedforward tuning rules
Advanced
Peer Reviewed Paper
Demonstration
This paper presents a practical comparison for some of the most relevant tuning rules for feedforward compensators that have been published in the recent years. The work is focused on the...
See More
Feedforward tuning rules for measurable disturbances with PID control: a tut...
Intermediate
Peer Reviewed Paper
Theory
Feedforward control can be considered as the most well-known control approach to deal with measurable disturbances. It started to be used almost 100 years ago, and since then it is being...
See More