
A proportional–integral–derivative controller (PID controller or three-term controller) is a control loop mechanism employing feedback that is widely used in industrial control systems and a variety of other applications requiring continuously modulated control. A PID controller continuously calculates an error value, e(t), as the difference between a desired setpoint (SP) and a measured process variable (PV) and applies a correction based on proportional, integral, and derivative terms (denoted P, I, and D respectively), hence the name.
Topic
Proportional-Integral-Derivative (PID) Controller
This topic includes the following resources and journeys:
Filters
Type
Experience
Scope
54 items
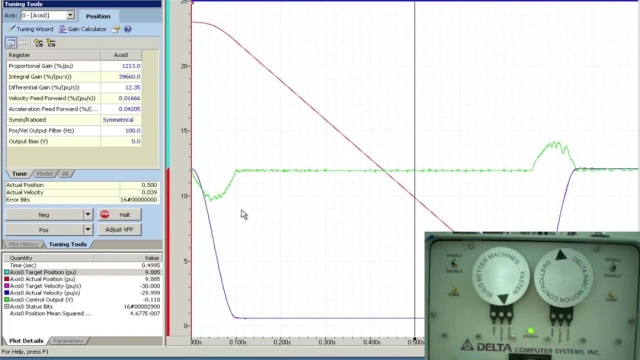
Auto Tuning a Small DC Motor in Torque Mode
1 min
Beginner
Video
Theory
I was really testing the picture in picture feature of the Screen Flow software I use to make these videos. I knew the auto tuning would work. I kept the v...
See More
Standard HW Problem #1: PID and Root Locus
18 min
Beginner
Video
Theory
A walk through of a typical homework problem using the root locus method to tune a PID controller. This is the first in what may be a series of homework style problems I'll cover. This is...
See More
Direct Synthesis for PID Design Intro
11 min
Beginner
Video
Theory
Direct Synthesis for PID Design Intro
See More