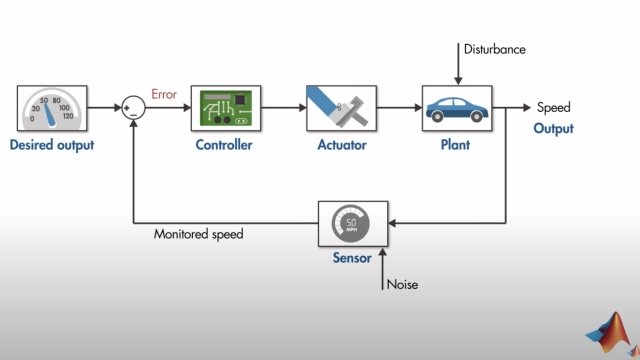
Feedback is extensively used in control theory, using a variety of methods including state space (controls), full state feedback, and so forth. Note that in the context of control theory, "feedback" is traditionally assumed to specify "negative feedback".
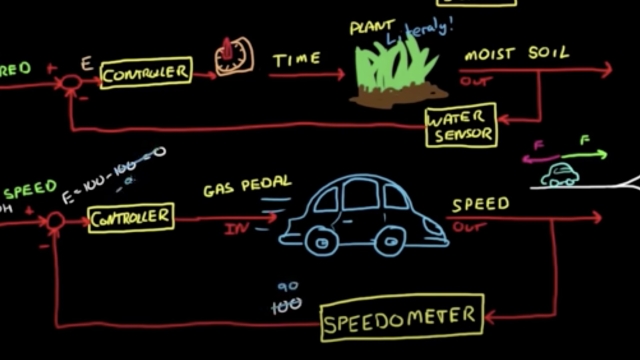
The most common general-purpose controller using a control-loop feedback mechanism is a proportional-integral-derivative (PID) controller. Heuristically, the terms of a PID controller can be interpreted as corresponding to time: the proportional term depends on the present error, the integral term on the accumulation of past errors, and the derivative term is a prediction of future error, based on current rate of change.