


Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 8 - Policy Gr...
71 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Internal Model Control IMC Introduction
4 min
Beginner
Video
Theory
Internal Model Control IMC Introduction
See More
Inner Products in Hilbert Space
8 min
Intermediate
Video
Theory
This video will show how the inner product of functions in Hilbert space is related to the standard inner product of vectors of data.
See More
Control Systems in Practice, Part 6: What Are Non-Minimum Phase Systems?
14 min
Beginner
Video
Theory
We like to categorize transfer functions into groups and label them because it helps us understand how a particular system will behave simply by knowing the group that it’s part of. We gain...
See More
RL Course by David Silver - Lecture 2: Markov Decision Process
102 min
Intermediate
Video
Theory
Explores Markov Processes including reward processes, decision processes and extensions.
See More
First Order Dynamics in Process Control
15 min
Beginner
Video
Theory
An overview on the identification and behavior of first order dynamics in process control.
See More
Data-Driven Control: Error Bounds for Balanced Truncation
11 min
Intermediate
Video
Theory
In this lecture, we derive error bounds for the balanced truncation.
See More
Numerically Linearizing a Dynamic System
104 min
Beginner
Video
Theory
In this video we show how to linearize a dynamic system using numerical techniques. In other words, the linearization process does not require an analytical...
See More
Humans, Robots, and Non-Prehensile Manipulation
12 min
Beginner
Video
Theory
This is a fun video that was inspired by a presentation I saw at the 2015 International Conference on Robotics and Automation (ICRA). I wanted to see if humans could duplicate the...
See More
Drone Simulation and Control, Part 3: How to Build the Flight Code
18 min
Beginner
Video
Theory
This video describes how to create quadcopter flight software from the control architecture developed in the last video. It covers how to process the raw sensor readings and use them with...
See More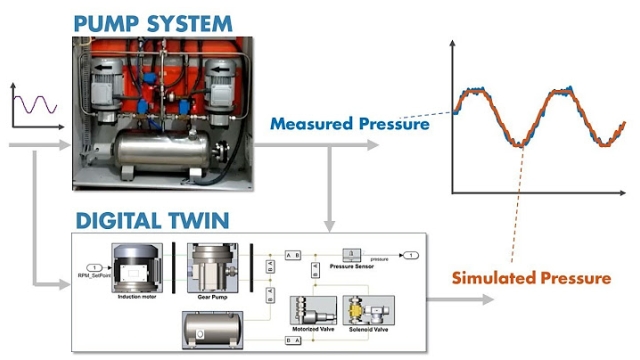
Digital Twin Parameter Tuning
9 min
Beginner
Video
Theory
Learn how to tune the digital twin model of a pump system to its physical asset using Simulink Design Optimization™. You can use measured data collected from the physical system to tune the...
See More
Partial Fraction Expansion/Decomposition
59 min
Beginner
Video
Theory
In this video we discuss how to perform partial fraction expansion (PFE) to rewrite a ratio of polynomials as simpler expressions. Topics and time stamps:(0...
See More
Peter Ponders PID - KalmanFilters, Alpha-Beta-Gamma filters
16 min
Beginner
Video
Theory

Control Bootcamp: Sensitivity and Complementary Sensitivity
11 min
Beginner
Video
Theory
Here we explore the sensitivity and complementary sensitivity functions, which are critical in understanding robustness and performance.
See More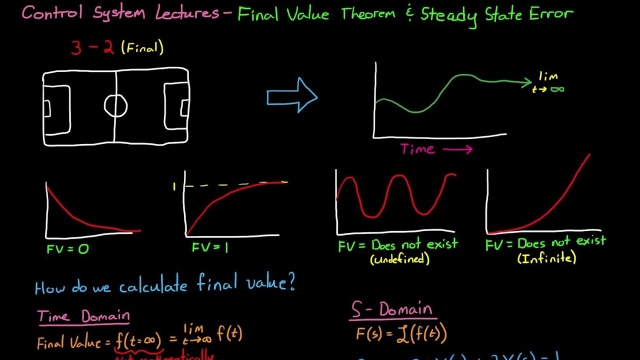
Final Value Theorem and Steady State Error
12 min
Beginner
Video
Theory
This Final Value Theorem is a way we can determine what value the time domain function approaches at infinity but from the S-domain transfer function. This is very helpful when we're trying...
See More
Euler Angles and the Euler Rotation Sequence
70 min
Intermediate
Video
Theory
In this video we discuss how Euler angles are used to define the relative orientation of one coordinate frame to another.
See More
Bode Plots of Complex Transfer Functions
65 min
Beginner
Video
Theory
In this video we discuss how to generate a bode plot of a complex transfer function by decomposing it into the individual components. We then show how one c...
See More
Peter Ponders PID - System Identification Advanced
19 min
Beginner
Video
Theory

Identifying Dominant Balance Physics from Data - Jared Callaham
12 min
Intermediate
Video
Theory
This video illustrates a new algorithm to identify local dominant physical balance relations from multiscale spatiotemporal data.
See More")
The Discrete Fourier Transform (DFT)
17 min
Beginner
Video
Application
This video introduces the Discrete Fourier Transform (DFT), which is how to numerically compute the Fourier Transform on a computer. The DFT, along with its fast FFT implementation, is one...
See More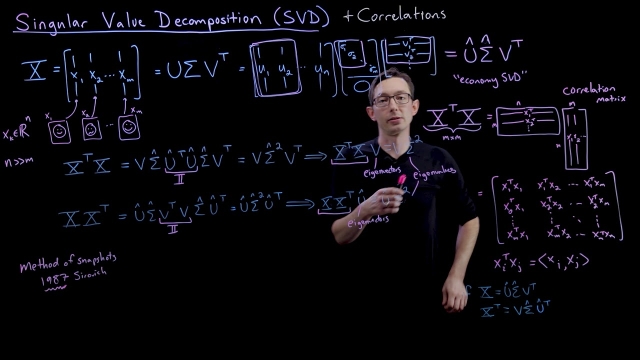
SVD Method of Snapshots
4 min
Beginner
Video
Theory
This video describes how to compute the singular value decomposition (SVD) using the method of snapshots, by Sirovich 1987.
See More")
Velocity & Acceleration in Non-Inertial Reference Frames (Coriolis &...
133 min
Beginner
Video
Theory
In this video we derive a mathematical description of velocity and acceleration in non-inertial reference frame. We examine the effect of fictitious forces ...
See More
Unitary Transformations
12 min
Beginner
Video
Theory
This video discusses unitary matrix transformations and how they relate to the geometry of the singular value decomposition (SVD).
See More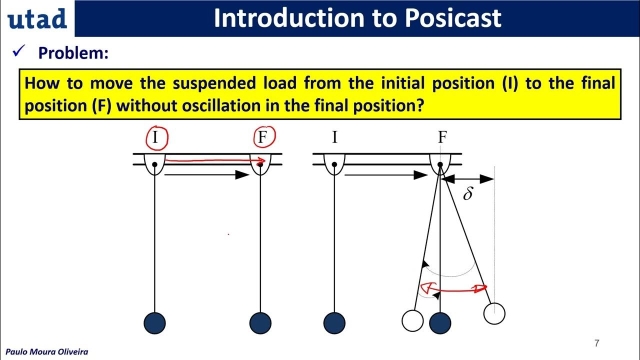
Posicast Control - 1 ( In English)
11 min
Beginner
Video
Theory
This video is an introduction to a learning journey about Posicast Control structured as follows: - Preface - Motivation - Introduction to Posicast Control - Half-Cycle Posicast
See More
Laplace domain – tutorial 1: Laplace transform
15 min
Beginner
Video
Theory
In this video, we learn about Laplace transform which enables us to travel from time to the Laplace domain. The following materials are covered:1) why we nee...
See More