


Lecture 17: Introduction to Compensators/Controllers
35 min
Beginner
Video
Theory
![SVD: Importance of Alignment [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_421.jpg?itok=xDlrjOXt)
SVD: Importance of Alignment [Matlab]
6 min
Beginner
Video
Application
This video describes the importance of aligning data when using the singular value decomposition (SVD) (Matlab code).
See More
Introduction to Partial Differential Equations
52 min
Beginner
Video
Theory
This is the first lesson in a multi-video discussion focused on partial differential equations (PDEs).In this video we introduce PDEs and compare them with o...
See More")
Koopman Spectral Analysis (Representations)
16 min
Intermediate
Video
Theory
In this video, we explore how to obtain finite-dimensional representations of the Koopman operator from data, using regression.
See More![Linear Regression 2 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_437.jpg?itok=jfYpmzNR "Linear Regression 2 [Python]")
Linear Regression 2 [Python]
5 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for linear regression in Python (part 2).
See More
Time domain - tutorial 4: transformation examples
5 min
Beginner
Video
Theory
In this video, we solve examples to practice different signal transformations using a systematic approach. By the end of this lecture, you should be able to ...
See More![Controllability and the Discrete-Time Impulse Response [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_302.jpg?itok=xjXmM9_U)
Controllability and the Discrete-Time Impulse Response [Control Bootcamp]
5 min
Beginner
Video
Theory
This lecture derives the impulse response for a discrete-time system and relates this to the controllability matrix.
See More
Machine Learning Control: Tuning a PID Controller with Genetic Algorithms
16 min
Beginner
Video
Theory
This lecture shows how to use genetic algorithms to tune the parameters of a PID controller. Tuning a PID controller with genetic algorithms is not generally recommended, but is used to...
See More
FIR Filter Design and Software Implementation
30 min
Intermediate
Video
Application
FIR (Finite Impulse Response) filter theory, design, and software implementation. Real-time software implementation on a custom STM32-based PCB. Overview of digital filtering, use-cases...
See More
Laplace domain – tutorial 6: Transfer function & system properties
24 min
Beginner
Video
Theory
In this video, we learn about transfer function and system properties. The following materials are covered:1) what is a transfer function?2) relation between...
See More
Laplace Transforms to Derive Transfer Functions
14 min
Beginner
Video
Theory
Once we have a state space model, we will take a Laplace Transform to derive the transfer function to determine the response of an output relative to an inpu...
See More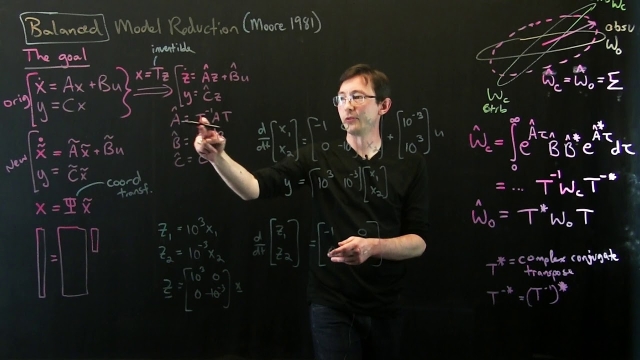
Data-Driven Control: Balancing Example
7 min
Intermediate
Video
Application
In this lecture, we give an example of how a change of coordinates can balance the controllability and observability of an input—output system.
See More
Understanding Model Predictive Control, Part 7: Adaptive MPC Design with Sim...
8 min
Beginner
Video
Theory
In this video, you will learn how to design an adaptive MPC controller for an autonomous steering vehicle system whose dynamics change with respect to the longitudinal velocity. After you...
See More
RL Course by David Silver - Lecture 1: Introduction to Reinforcement Learnin...
88 min
Intermediate
Video
Theory
Introduces reinforcment learning (RL), an overview of agents and some classic RL problems.
See More
Direct Synthesis for PID Controller Design
12 min
Beginner
Video
Theory
What tuning parameters should you choose for your controller? The Direct Synthesis Model is one method control engineers use today to evaluate controller par...
See More
Discrete control #1: Introduction and overview
22 min
Beginner
Video
Theory
So far I have only addressed designing control systems using the frequency domain, and only with continuous systems. That is, we’ve been working in the S domain with transfer functions. We...
See More
Simple Examples of PID Control
13 min
Beginner
Video
Theory
In this video I continue the topic of PID control. We walk through a simple control system and visualize how each of the three paths, P, I, and D, all address specific problems that arise...
See More
State Space Representation of Differential Equations
69 min
Beginner
Video
Theory
In this video we show how to represent differential equations (either linear or non-linear) in state space form. This is useful as it allows us to combine an...
See More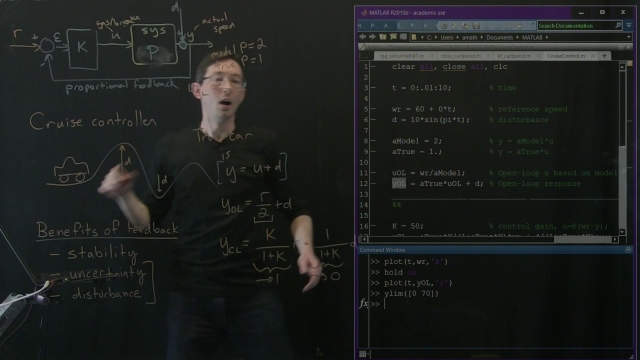
Control Bootcamp: Benefits of Feedback on Cruise Control Example (Part 2)
11 min
Beginner
Video
Theory
Here we investigate the benefits of feedback for systems with uncertain dynamics and disturbances, as illustrated on a cruise control example. (Part 2)
See More
Humans, Robots, and Non-Prehensile Manipulation
12 min
Beginner
Video
Theory
This is a fun video that was inspired by a presentation I saw at the 2015 International Conference on Robotics and Automation (ICRA). I wanted to see if humans could duplicate the...
See More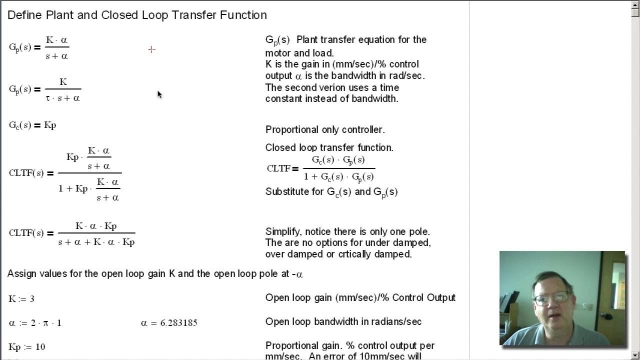
Peter Ponders PID - Controlling non-integrating single pole system. Part 1 ...
10 min
Beginner
Video
Theory
Part 1 shows why P only control shouldn't be used because the set point or target is never reached.Part 2 shows why I only control shouldn't be used because ...
See More
The Navigation Equations: Computing Position North, East, and Down
52 min
Intermediate
Video
Theory
In this video we show how to compute the inertial velocity of a rigid body in the vehicle-carried North, East, Down (NED) frame. This is achieved by rotating the velocity expressed in the...
See More
Partial Fraction Expansion/Decomposition
59 min
Beginner
Video
Theory
In this video we discuss how to perform partial fraction expansion (PFE) to rewrite a ratio of polynomials as simpler expressions. Topics and time stamps:(0...
See More")
Introduction to the Fourier Transform (Part 1)
13 min
Beginner
Video
Theory
This video is an introduction to the Fourier Transform. I try to give a little bit of background into what the transform does and then I go step by step through explaining the Inverse...
See More
Control Bootcamp: Sensitivity and Complementary Sensitivity
11 min
Beginner
Video
Theory
Here we explore the sensitivity and complementary sensitivity functions, which are critical in understanding robustness and performance.
See More