

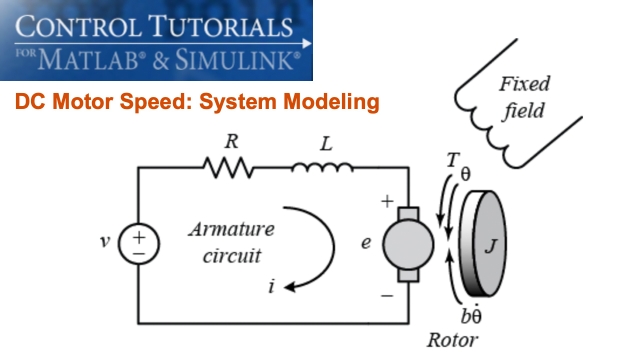
DC Motor Speed: System Modeling
Beginner
Project
Theory
This examples walks through modeling a simple DC motor in MATLAB.
See More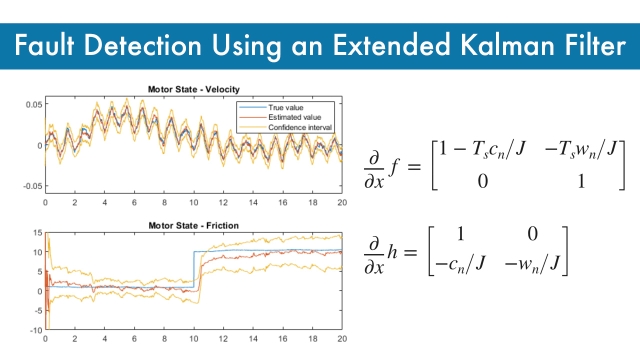
MATLAB Example: Fault Detection Using an Extended Kalman Filter
Intermediate
Project
Application
This example shows how to use an extended Kalman filter for fault detection. The example uses an extended Kalman filter for online estimation of the friction of a simple DC motor...
See More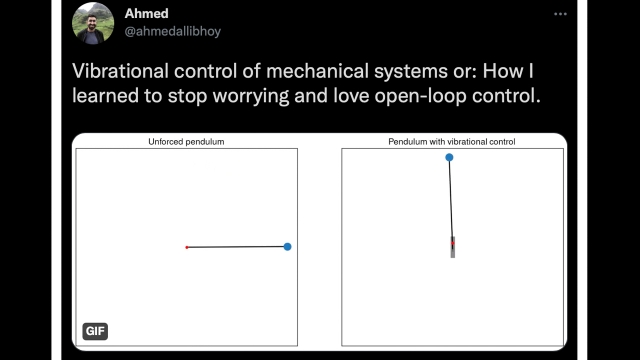
Twitter Thread: Vibrational control of mechanical systems
Intermediate
Social Media
Application
This Twitter thread by @ahmedallibhoy walks through an explanation of controlling an inverted pendulum with an open-loop vibrational controller.
See More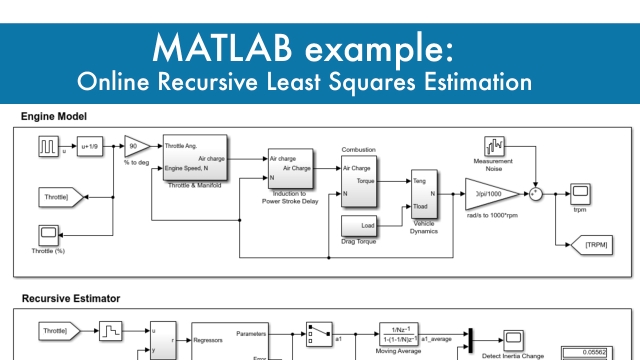
MATLAB Example: Online Recursive Least Squares Estimation
Intermediate
Project
Demonstration
This example shows how to implement an online recursive least squares estimator. You estimate a nonlinear model of an internal combustion engine and use recursive least squares to detect...
See More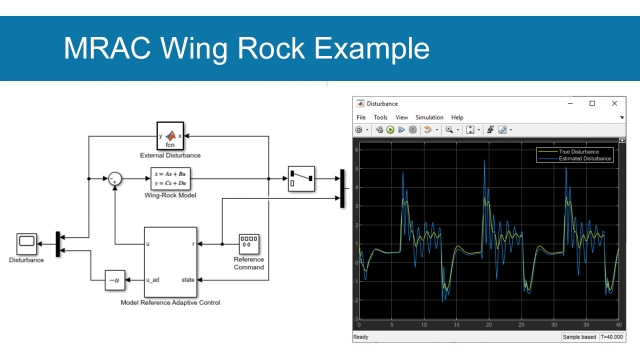
Model Reference Adaptive Control of Aircraft Undergoing Wing Rock
Intermediate
Project
Theory
This example shows how to control roll and roll rate of a delta wing aircraft undergoing wing rock. For this example, the system model is unknown. Therefore, you use model reference adaptive...
See More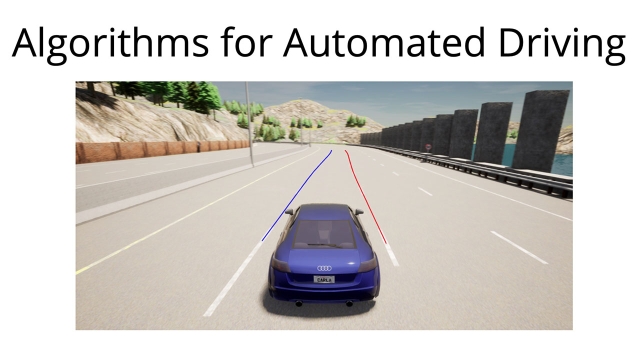
Algorithms for Automated Driving
Intermediate
Project
Application
Each chapter of this (mini-)book guides you in programming one important software component for automated driving. Currently, this book contains two chapters: Lane Detection, and Control...
See More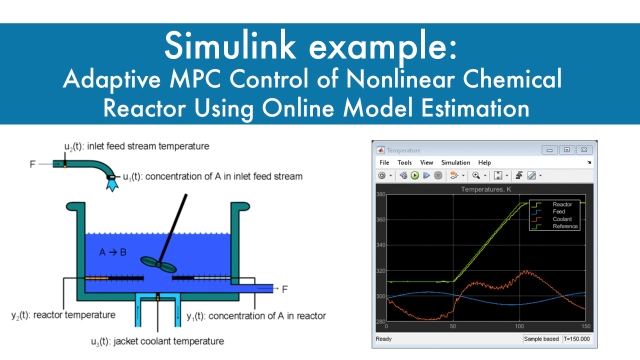
Simulink example: Adaptive MPC Control of Nonlinear Chemical Reactor Using O...
Intermediate
Project
Application
This example shows how to use an Adaptive MPC controller to control a nonlinear continuous stirred tank reactor (CSTR) as it transitions from low conversion rate to high conversion rate.
A...
See More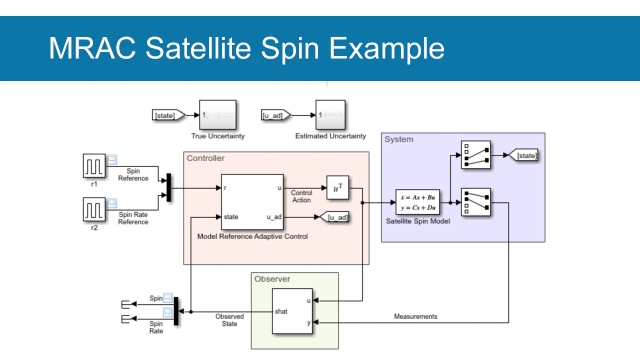
Model Reference Adaptive Control of Satellite Spin
Intermediate
Project
Theory
This example shows how to control satellite spin using model reference adaptive control (MRAC) to make the unknown controlled system match an ideal reference model. The satellite system is...
See More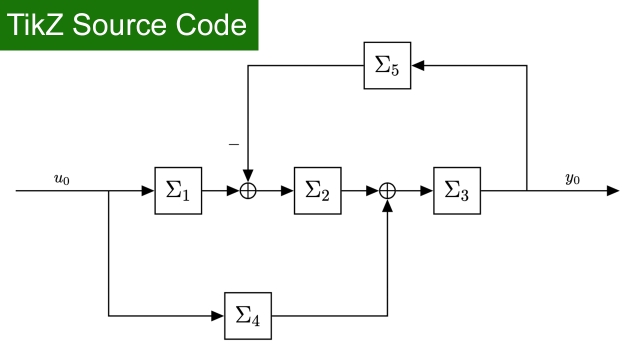
TikZ source Code: Nested subsystems
Beginner
Source Code
Application
TikZ source Code: Nested subsystems
See More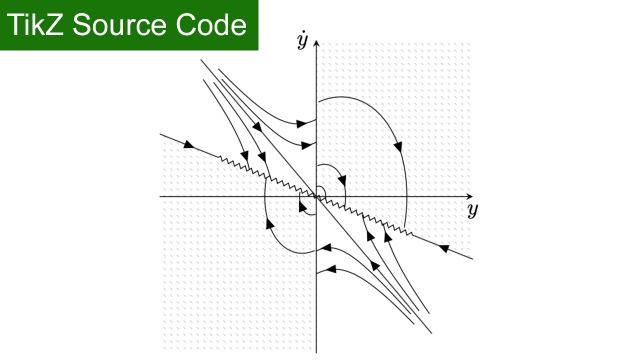
TikZ source Code: Sliding Mode Control Example
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example
See More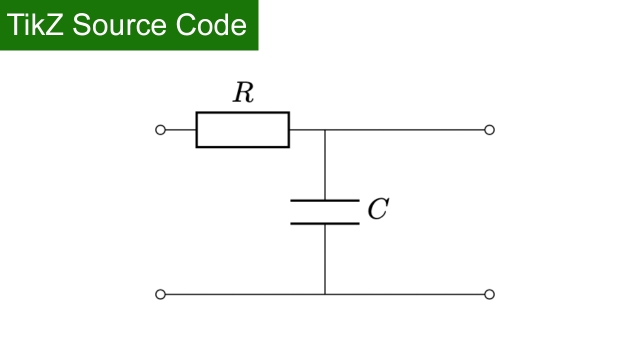
TikZ source Code: RC Lowpass
Beginner
Source Code
Application
TikZ source code for an RC Lowpass filter.
See More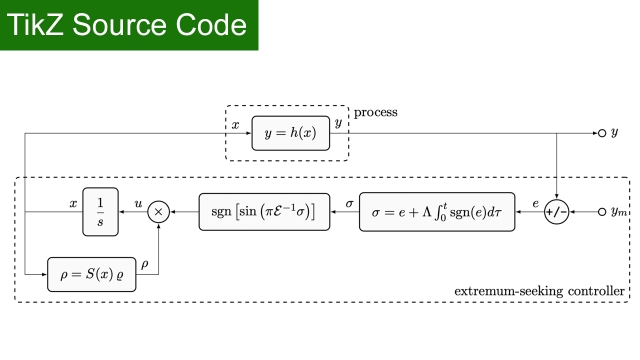
TikZ source Code: Extremum Seeking Control Block Diagram
Beginner
Source Code
Application
TikZ source Code: Extremum Seeking Control Block Diagram
See More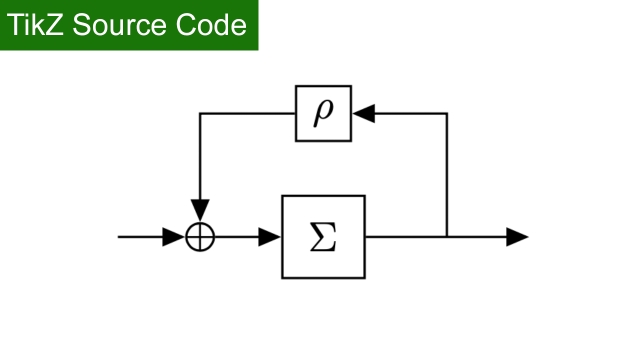
TikZ source Code: Feedback passivity index
Beginner
Source Code
Application
TikZ source Code: Feedback passivity index
See More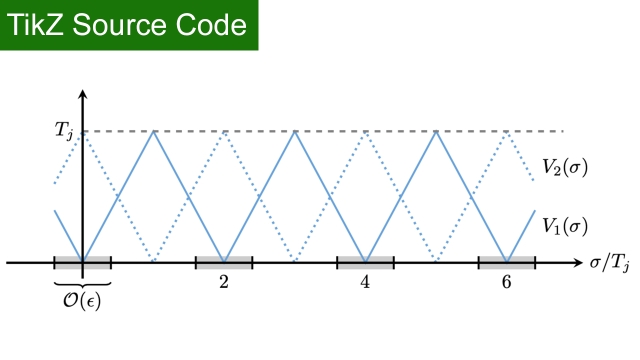
TikZ source Code: Lyapunov Lure
Beginner
Source Code
Application
TikZ source Code: Lyapunov Lure
See More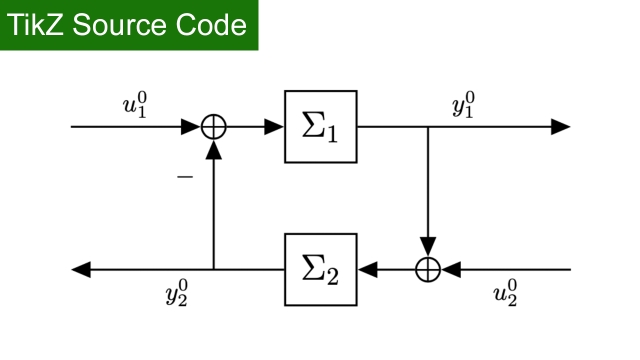
TikZ source Code: Two systems in negative feedback
Beginner
Source Code
Application
TikZ source Code: Two systems in negative feedback
See More
TikZ source Code: Sliding Mode Control Example System 2
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example System 2
See More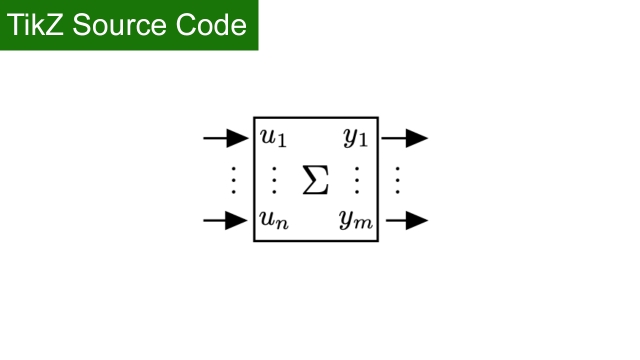
TikZ source Code: A single MIMO system
Beginner
Source Code
Application
TikZ source Code: A single MIMO system
See More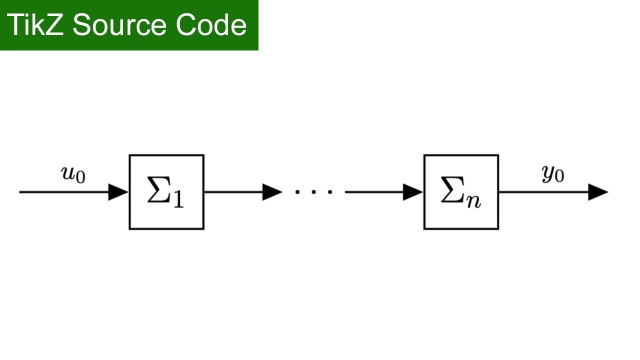
TikZ source Code: Cascade of several subsystems
Beginner
Source Code
Application
TikZ source Code: Cascade of several subsystems.
See More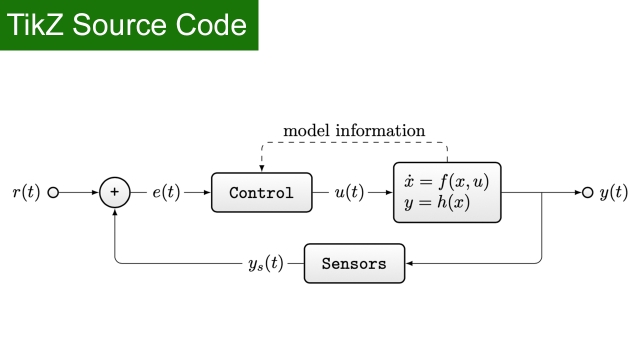
TikZ source Code: Feedback system
Beginner
Source Code
Application
TikZ source Code: Feedback system
See More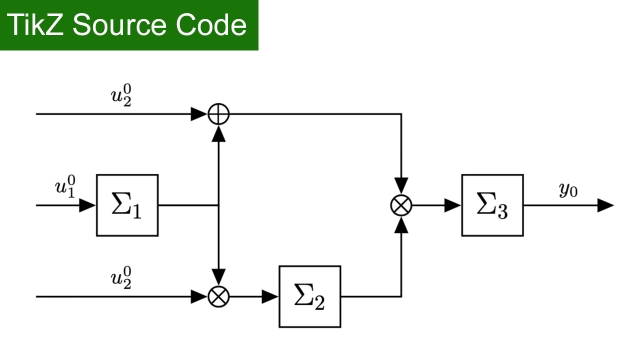
TikZ source Code: Multiplication of system variables
Beginner
Source Code
Application
TikZ source Code: Multiplication of system variables
See More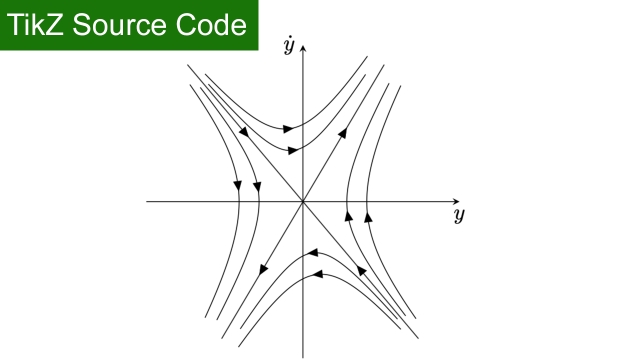
TikZ source Code: Sliding Mode Control Example System 1
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example System 1
See More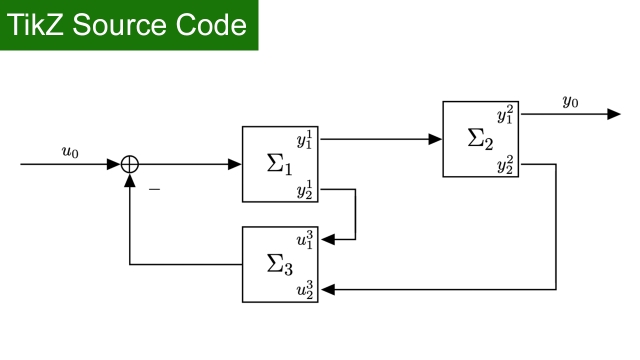
TikZ source Code: Interconnected MIMO Subsystems
Beginner
Source Code
Application
TikZ source Code: Interconnected MIMO Subsystems with different input and output dimensions
See More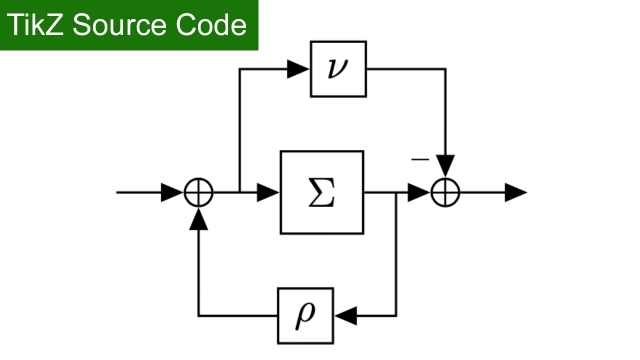
TikZ source Code: Both passivity indices applied
Beginner
Source Code
Application
TikZ source Code: Both passivity indices applied.
See More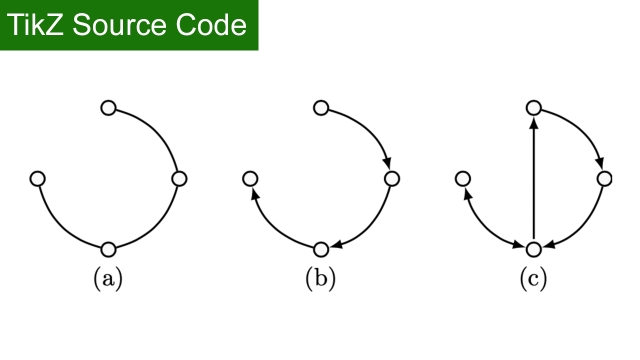
TikZ source Code: Example Graph
Beginner
Source Code
Application
TikZ source Code: Example Graph
See More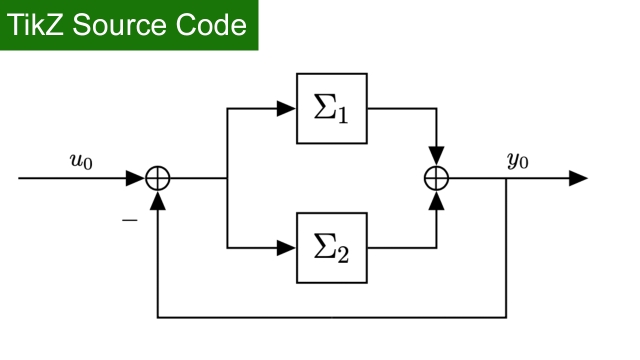
TikZ source Code: Feedback systems
Beginner
Source Code
Application
TikZ source Code: Feedback systems
See More