

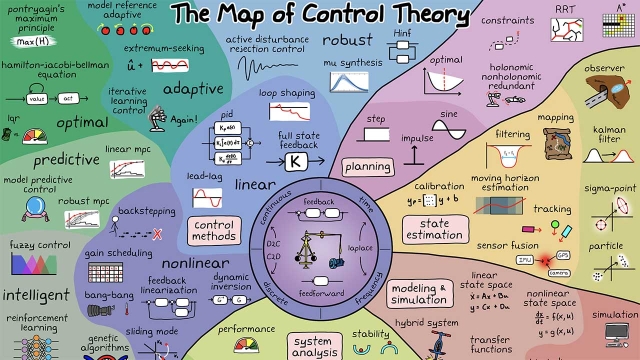
The Map of Control Theory
Beginner
Image
Theory
All of control theory in one map. The idea behind this map is not to capture everything within control theory, it is to highlight some of the main areas of the field and provide a few...
See More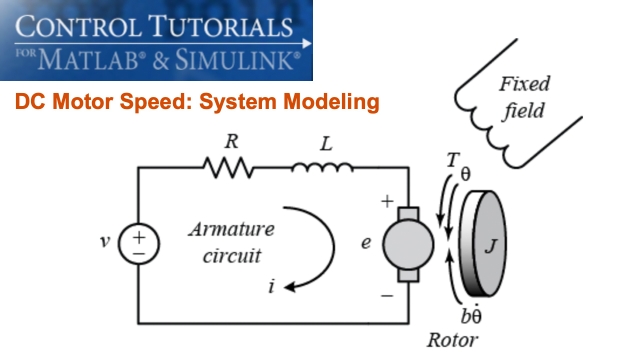
DC Motor Speed: System Modeling
Beginner
Project
Theory
This examples walks through modeling a simple DC motor in MATLAB.
See More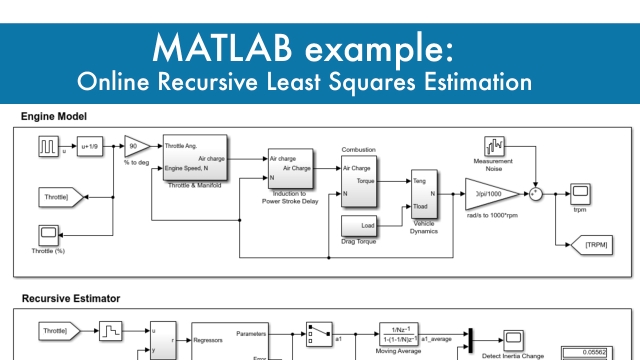
MATLAB Example: Online Recursive Least Squares Estimation
Intermediate
Project
Demonstration
This example shows how to implement an online recursive least squares estimator. You estimate a nonlinear model of an internal combustion engine and use recursive least squares to detect...
See More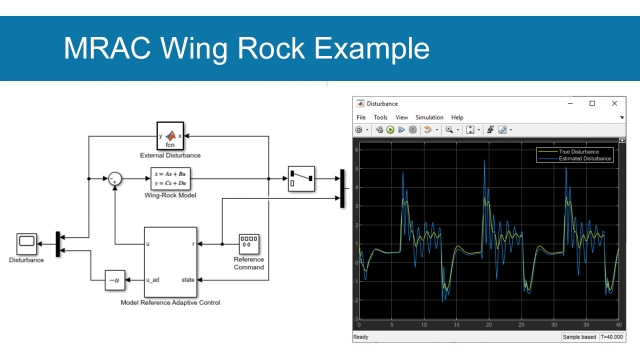
Model Reference Adaptive Control of Aircraft Undergoing Wing Rock
Intermediate
Project
Theory
This example shows how to control roll and roll rate of a delta wing aircraft undergoing wing rock. For this example, the system model is unknown. Therefore, you use model reference adaptive...
See More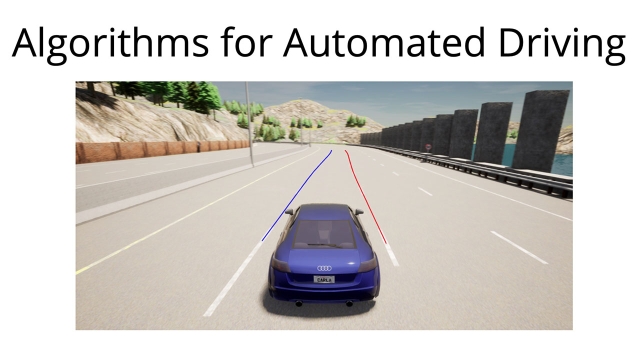
Algorithms for Automated Driving
Intermediate
Project
Application
Each chapter of this (mini-)book guides you in programming one important software component for automated driving. Currently, this book contains two chapters: Lane Detection, and Control...
See More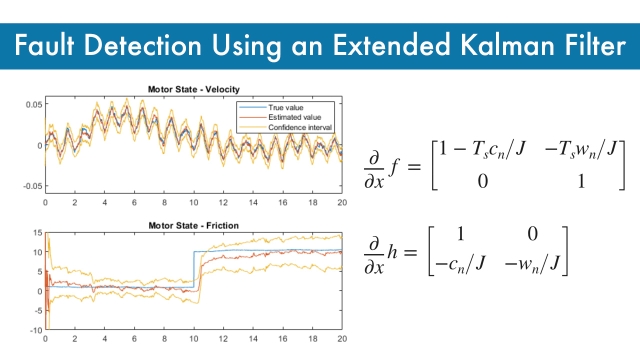
MATLAB Example: Fault Detection Using an Extended Kalman Filter
Intermediate
Project
Application
This example shows how to use an extended Kalman filter for fault detection. The example uses an extended Kalman filter for online estimation of the friction of a simple DC motor...
See More
Advances in Feedforward Control for Measurable Disturbances (slides)
Intermediate
Presentation
Theory
These slides present several contributions to improve the feedforward control approaches when inversion problem arise: the ideal compensator may not be realizable due to negative delay...
See More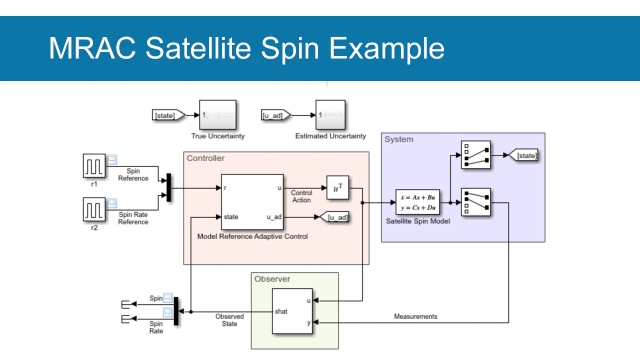
Model Reference Adaptive Control of Satellite Spin
Intermediate
Project
Theory
This example shows how to control satellite spin using model reference adaptive control (MRAC) to make the unknown controlled system match an ideal reference model. The satellite system is...
See More
Radar Systems Engineering Lecture 4: The Radar Equation
Beginner
Presentation
Theory
This Free Radar Systems Engineering Course (video, audio and screen captured ppt slides) and separate pdf slides) has been developed as a first course in Radar Systems for first year...
See More
Introduction to Radar Systems: Target Radar Cross Section
Beginner
Presentation
Theory
This course is presented by Robert M. O'Donnell, a former researcher at MIT Lincoln Laboratory, and is designed to instill a basic working knowledge of radar systems.
The set of 10 lectures...
See More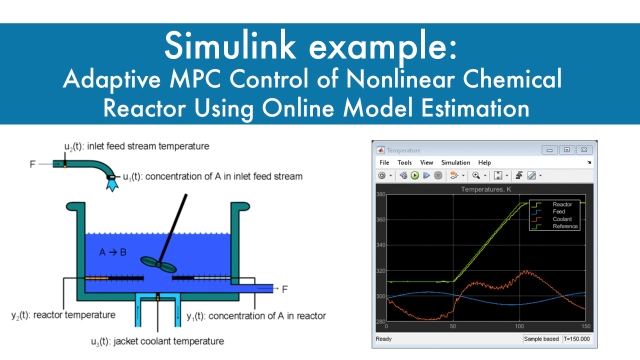
Simulink example: Adaptive MPC Control of Nonlinear Chemical Reactor Using O...
Intermediate
Project
Application
This example shows how to use an Adaptive MPC controller to control a nonlinear continuous stirred tank reactor (CSTR) as it transitions from low conversion rate to high conversion rate.
A...
See More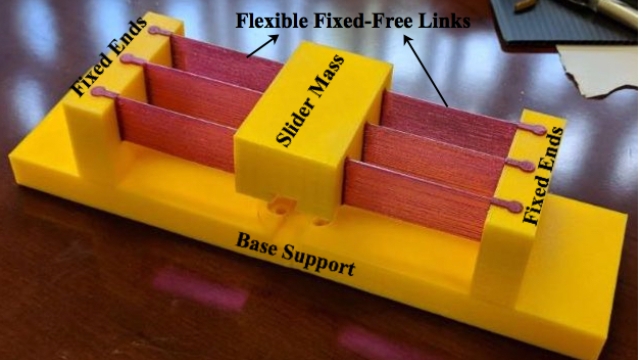
3D Printed Laboratory Equipment to Study Fundamentals of Vibrations: Complia...
180 min
Intermediate
Project
Application
This low-cost, portable, and 3D-Printed Laboratory Equipment (3D-PLE) can be utilized to achieve the following learning outcomes:
- Derive the equation of motion of a translational...
Basic Control Lectures
Beginner
Presentation
Theory
Systems approach, understanding and describing the operation of systems and methods of controlling them are among the basic knowledge of engineering education. But understanding the main...
See More