


How a Kalman Filter Works in Pictures
20 min
Beginner
Article / Blog
Theory
This article builds up some intuition about the Kalman filter using pictures before diving into the mathematics. A beginner will come away with an understanding of what the Kalman filter is...
See More
The Kalman Filter
25 min
Beginner
Article / Blog
Theory
This article introduces the Kalman filter at a high level and tries to provide some insight into how the filter is able to estimate state by combining measurements and models.
This is an...
See More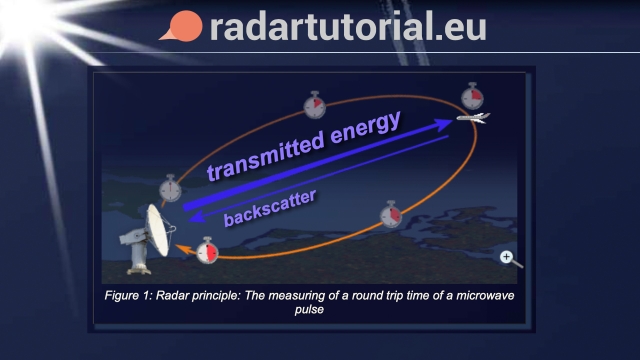
Radar Tutorial (English)
Beginner
Article / Blog
Theory
This page provides a detailed overview of radar principles and technologies, including mathematical, physical and technical explanations. “Radartutorial” explains the fundamentals of radar...
See More
An Introduction to the Kalman Filter
45 min
Beginner
Article / Blog
Theory
The purpose of this paper is to provide a practical introduction to the discrete Kalman filter. This introduction includes a description and some discussion of the basic discrete Kalman...
See More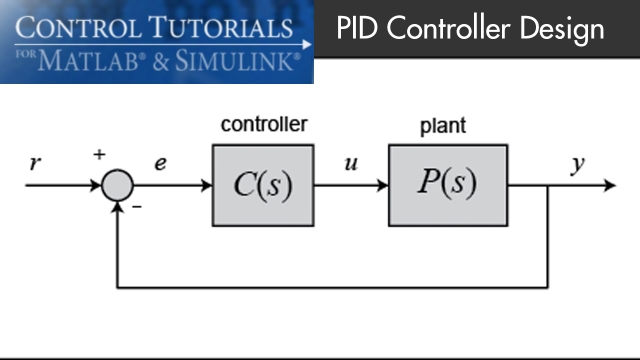
Introduction: PID Controller Design
30 min
Beginner
Article / Blog
Application
In this tutorial we will introduce a simple, yet versatile, feedback compensator structure: the Proportional-Integral-Derivative (PID) controller. The PID controller is widely employed...
See More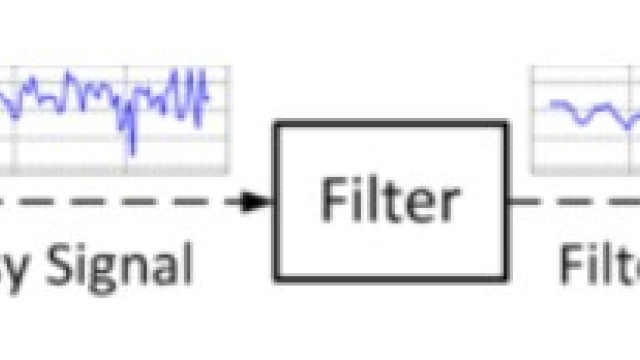
Introduction to Noise Filtering
20 min
Intermediate
Article / Blog
Application
Introduction to filtering - moving average, first-order, anti-aliasing, set point softening
See More
Introducing Feedback Control to Middle and High School STEM Students, Part 2...
60 min
Intermediate
Article / Blog
Demonstration
This paper was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims at...
See More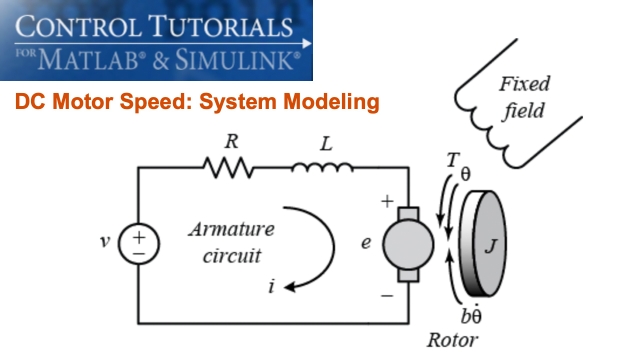
DC Motor Speed: System Modeling
Beginner
Project
Theory
This examples walks through modeling a simple DC motor in MATLAB.
See More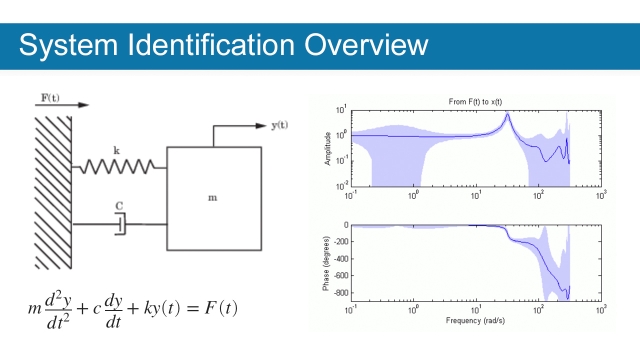
System Identification Overview
Beginner
Article / Blog
Theory
System identification is a methodology for building mathematical models of dynamic systems using measurements of the input and output signals of the system. This overview from Mathworks...
See More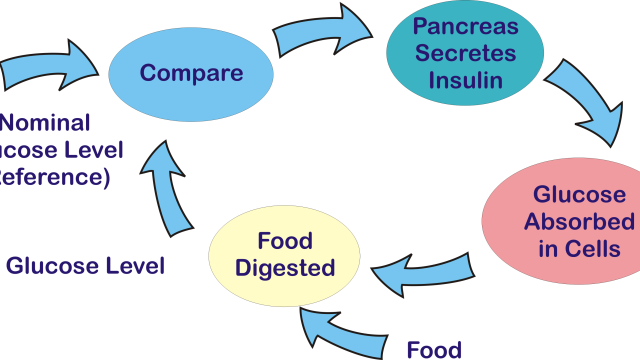
Introducing Feedback Control to Middle and High School STEM Students, Part 1...
60 min
Intermediate
Article / Blog
Demonstration
This paper was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims at...
See More
Discrete Fourier Transform
Intermediate
Article / Blog
Theory
The discrete Fourier transform, or DFT, is the primary tool of digital signal processing. The foundation of the product is the fast Fourier transform (FFT), a method for computing the DFT...
See More
What's a Control System and Why Should I Care? A whirlwind tour through the ...
60 min
Beginner
Article / Blog
Theory
This paper aims to provide some introduction, a cheat sheet, and some context for college level STEM students about to take that first controls class. In some cases, it provides context...
See More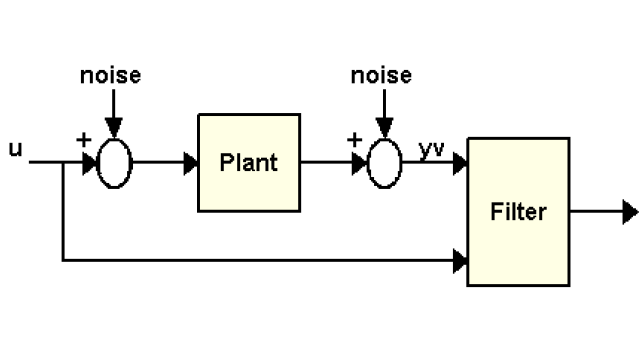
Kalman Filter Design
30 min
Intermediate
Article / Blog
Application
This example shows how to perform Kalman filtering. Both a steady state filter and a time varying filter are designed and simulated.
See More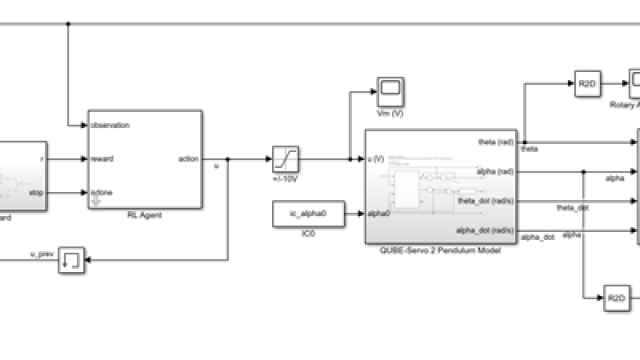
Using the Reinforcement Learning Toolbox™ to Balance an Inverted Pendulum
30 min
Intermediate
Article / Blog
Application
Reinforcement learning (RL) is a subset of Machine Learning that uses dynamic data, not static data like unsupervised learning or supervised learning. Reinforcement learning is used in many...
See More
Road Sign Detection using Transfer Learning on RetinaNet
15 min
Intermediate
Article / Blog
Application
This blog outlines a number of open-source resources for transfer learning that are worthy of exploring, ands show the result of using transfer learning on RetinaNet to develop a road sign...
See More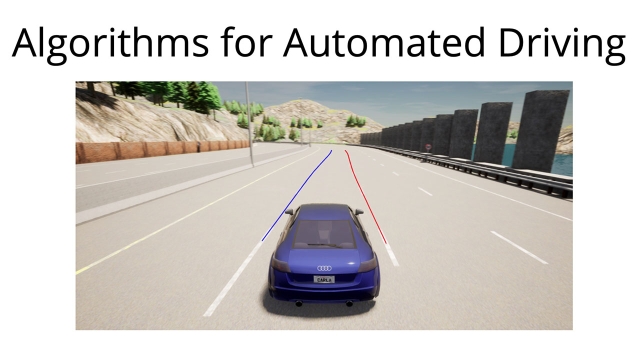
Algorithms for Automated Driving
Intermediate
Project
Application
Each chapter of this (mini-)book guides you in programming one important software component for automated driving. Currently, this book contains two chapters: Lane Detection, and Control...
See More
Thoughts on Furthering the Control Education of Practicing Engineers
60 min
Intermediate
Article / Blog
Demonstration
This paper was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims to...
See More
How Kalman Filters Work, Part 1
30 min
Beginner
Article / Blog
Theory
This article looks at four popular estimation filter architectures: particle filter, sigma point filter, extended Kalman filter, and the Kalman filter. It discusses how all four of these...
See More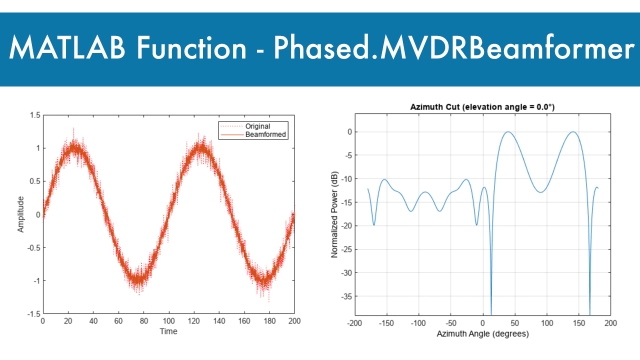
MATLAB Function: phased.MVDRBeamformer
Intermediate
Article / Blog
Application
The phased.MVDRBeamformer System object™ implements a narrowband minimum-variance distortionless-response (MVDR) beamformer. The MVDR beamformer is also called the Capon beamformer. An MVDR...
See More
Improving the Beginner's PID - Introduction
30 min
Beginner
Article / Blog
Application
In conjunction with the release of the new Arduino PID Library Brett has released this series of posts that explain his PID code. He start's with what he call's “The Beginner’s PID.” He...
See More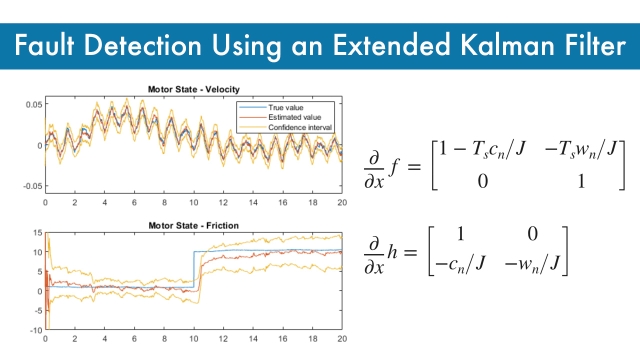
MATLAB Example: Fault Detection Using an Extended Kalman Filter
Intermediate
Project
Application
This example shows how to use an extended Kalman filter for fault detection. The example uses an extended Kalman filter for online estimation of the friction of a simple DC motor...
See More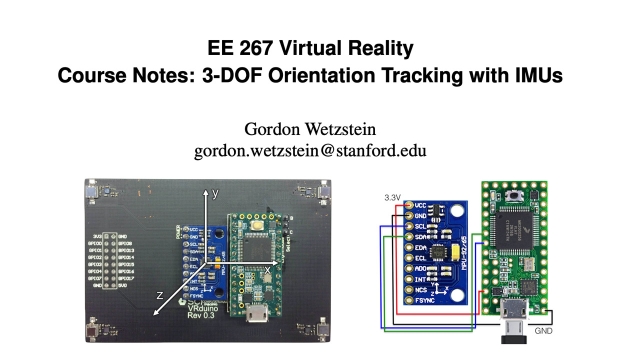
3-DOF Orientation Tracking with IMUs
30 min
Beginner
Article / Blog
Theory
This document is not meant to be a comprehensive review of orientation tracking for virtual reality applications but rather an intuitive introduction to inertial measurement units (IMUs) and...
See More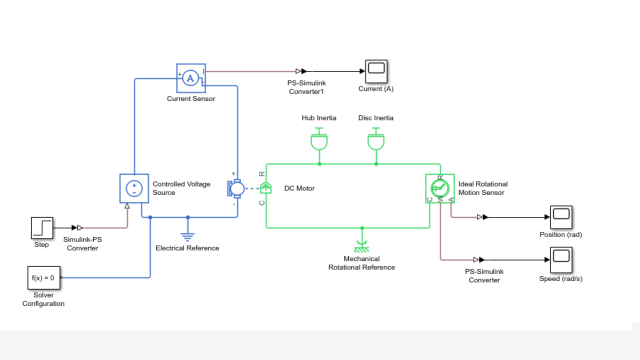
Using Simscape™ to Model a Quanser QUBE-Servo 2 with Friction
15 min
Intermediate
Article / Blog
Theory
Modelling a DC servomotor is one of the common examples used in control system textbooks and courses. Given that so many systems use DC motors, e.g. robot manipulator arms, it’s an important...
See More
TCLab PID Control
60 min
Intermediate
Article / Blog
Application
Implement a PID controller on the Temperature Control Lab hardware to drive the temperature from room temperature to 60 degrees C. This resource lets you attempt the design yourself first...
See More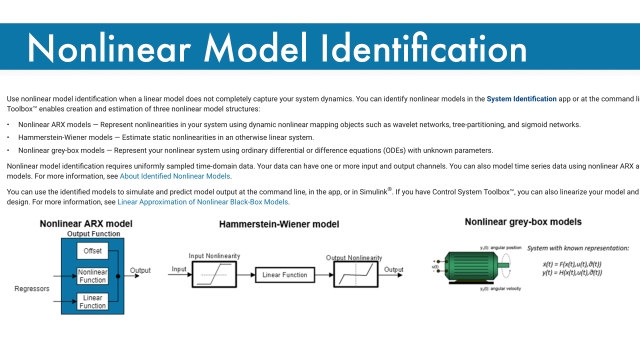
Nonlinear Model Identification
Intermediate
Article / Blog
Application
Mathwork overview page describing nonlinear model identification. Use nonlinear model identification when a linear model does not completely capture your system dynamics. You can identify...
See More