

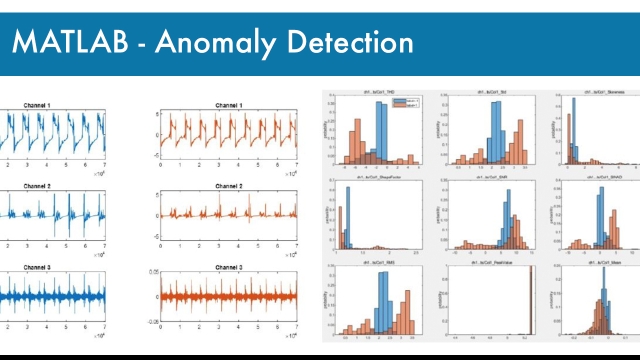
MATLAB Discovery Page - Anomaly Detection
Beginner
Article / Blog
Theory
Anomaly detection is the process of identifying events or patterns that differ from expected behavior. Anomaly detection can range from simple outlier detection to complex machine learning...
See More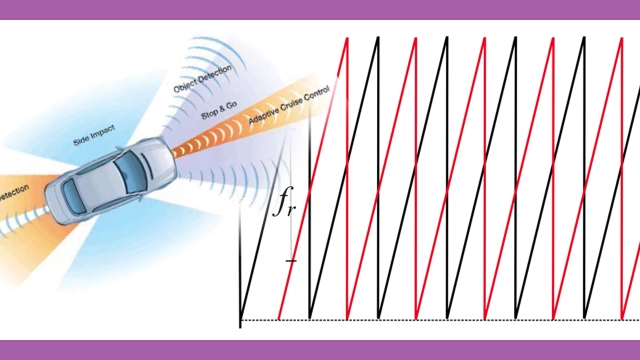
Fast chirp FMCW Radar in automotive applications
Advanced
Peer Reviewed Paper
Theory
FMCW (frequency-modulated continuous wave radar) modulations have been popularly implemented in the automotive radar applications. This document demonstrates system requirement for a new...
See More
3D Kinematics, Free Falling, Reference Frames
53 min
Intermediate
Video
Theory
Walter Lewin is one of the most reputed professors and was a former lecturer at MIT. His free to watch series on YouTube titled 8.01 is an excellent one for undergrads and high school...
See More
Intro to Data Science: Answering Questions with Data
6 min
Beginner
Video
Theory
This lecture describes the central aspect of data science: asking and answering questions with data. In particular, we discuss the thought process and progression of questions one might ask...
See More
A simple MEMS gyro model using MATLAB / Simulink
16 min
Beginner
Video
Theory
This video walks through how to model a simple MEMS gyroscope using MATLAB/Simulink. At the end I show you how to linearize this model to use in your linear control loop design and analysis.
See More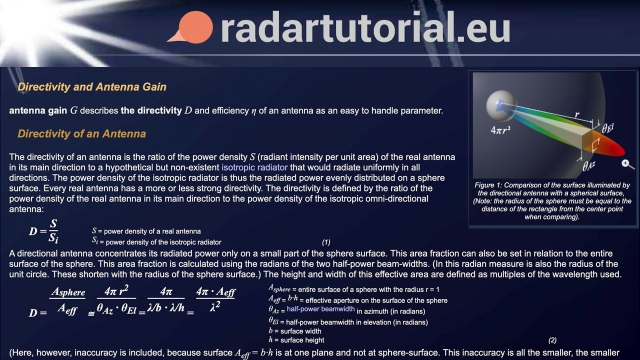
Directivity and Antenna Gain - radartutorial.eu
Beginner
Article / Blog
Theory
This page describes antenna directivity and gain. The directivity of an antenna is the ratio of the power density S (radiant intensity per unit area) of the real antenna in its main...
See More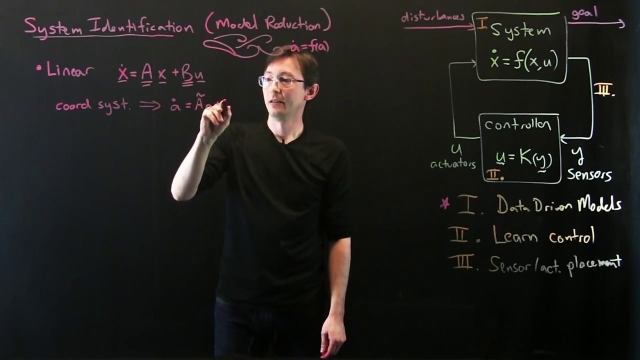
Data-Driven Control: Linear System Identification
20 min
Beginner
Video
Theory
Overview lecture on linear system identification and model reduction. This lecture discusses how we obtain reduced-order models from data that optimally capture input--output dynamics.
See More
Control Systems in Practice, Part 5: A Better Way to Think About a Notch Fil...
13 min
Beginner
Video
Theory
This video describes an intuitive way to approach notch filter design by thinking about the problem as an inverted, lightly damped, second-order low-pass filter. Then, two additional poles...
See More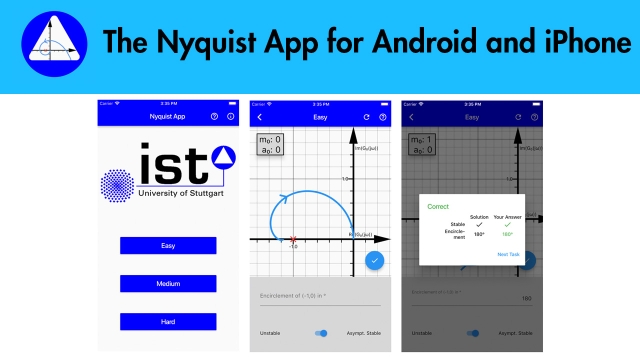
Android and iPhone E-Learning App for Nyquist Stability Criterion
Intermediate
App
Theory
In our Nyquist App, you can analyze the stability of the closed loop by using the Nyquist stability criterion. With the Nyquist stability criterion, you can determine the stability of the...
See More
What are Phased Arrays?
17 min
Beginner
Video
Theory
This video introduces the concept of phased arrays. An array refers to multiple sensors, arranged in some configuration, that act together to produce a desired sensor pattern. With a phased...
See More
Autonomous Navigation, Part 6: Metrics for System Assessment
15 min
Beginner
Video
Theory
Take a systems engineering approach to verifying the autonomous navigation system end to end and learn how simulations and physical tests can complement each other. The video also covers a...
See More
The Linear Quadratic Regulator (LQR)
Intermediate
Article / Blog
Theory
Lecture notes for ECE717 on LQR control by Laurent Lessard. There is a section that shows how the Algebraic Riccati Equation is part of the LQR solution by "completing the square".
See More
Vibrational control of nonlinear systems: Vibrational controllability and tr...
Intermediate
Peer Reviewed Paper
Theory
In the first part of this work, the criteria for the existence of stabilizing parametric oscillations have been derived. In the present paper, the problem of choosing the stabilizing...
See More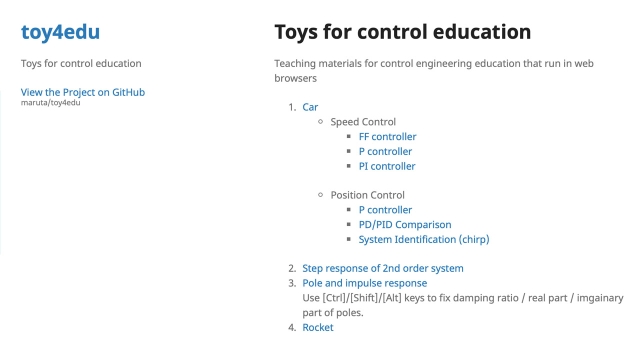
Toys for Control Education
Intermediate
App
Theory
Teaching materials for control engineering education that run in web browsers. Speed control, position control, step response of 2nd order system, pole and impulse response, and rocket.
See More![Inverted Pendulum on a Cart [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_377.jpg?itok=1srGYhtD "Inverted Pendulum on a Cart [Control Bootcamp]")
Inverted Pendulum on a Cart [Control Bootcamp]
15 min
Beginner
Video
Theory
In this video, we introduce an example system to control: an inverted pendulum on a cart. We describe the state-space, find the fixed points, and simulate the system in Matlab. Because the...
See More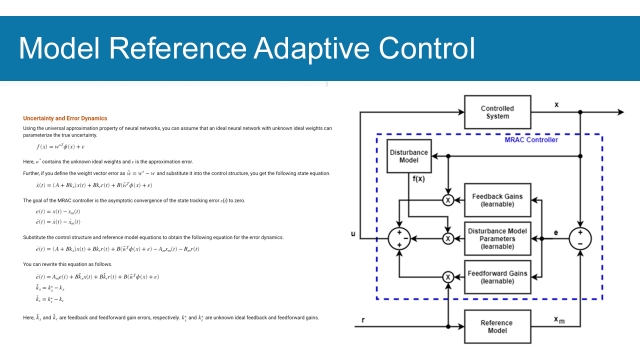
Mathworks Model Reference Adaptive Control Overview
Beginner
Article / Blog
Theory
This website provides an overview of the mathematics behind Model Reference Adaptive Control (MRAC). MRAC is a model-based, real-time adaptive control algorithm that computes control actions...
See More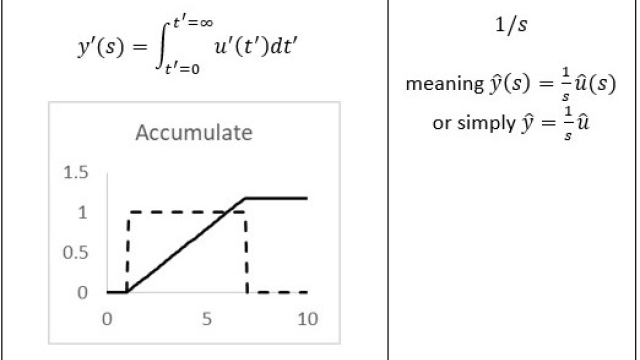
No! Not Laplace Transforms
60 min
Intermediate
Course
Theory
In my 13-year industrial career, I never used Laplace transforms. However, transfer functions and block diagram notation are efficient methods to describe dynamic behaviors, and are often...
See More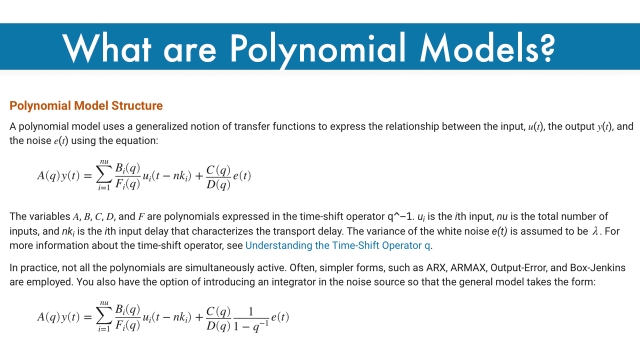
What are Polynomial Models?
Intermediate
Article / Blog
Theory
This Mathworks page provides an overview of polynomial models.
See More
Understanding the Discrete Fourier Transform and the FFT
19 min
Beginner
Video
Theory
The discrete Fourier transform (DFT) transforms discrete time-domain signals into the frequency domain. The most efficient way to compute the DFT is using a fast Fourier transform (FFT)...
See More
Online and Recursive System Identification | System Identification, Part 4
19 min
Beginner
Video
Theory
Online system identification algorithms estimate the parameters and states of a model as new data is measured and available in real-time or near real-time. Brian Douglas covers what online...
See More
Peter Ponders PID - Introduction
3 min
Beginner
Video
Theory
The purpose of this video is to inform the viewer about what to expect. My videos go much deeper than the typical videos. They are geared for graduate st...
See More")
Robotic Car - How to read Gyro Datasheets (Part 1)
14 min
Beginner
Video
Theory
Have you ever been lost trying to understand the information in a gyro datasheet? This video should help! In this first part I go through the mechanical characteristics of a MEMS gyro and...
See More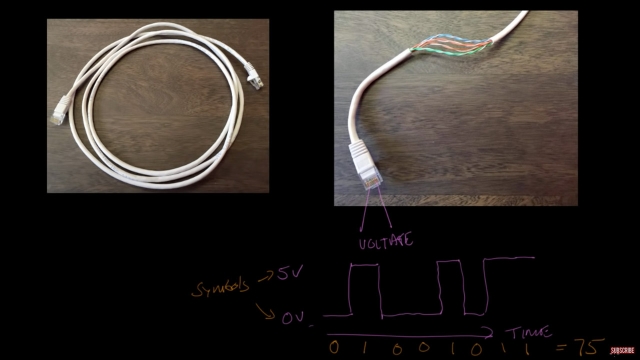
Sending digital information over a wire | Networking tutorial (1 of 13)
4 min
Beginner
Video
Theory
This video lecture is the beginning of an exploration of computer networking with the basics of sending digital information with a copper wire.
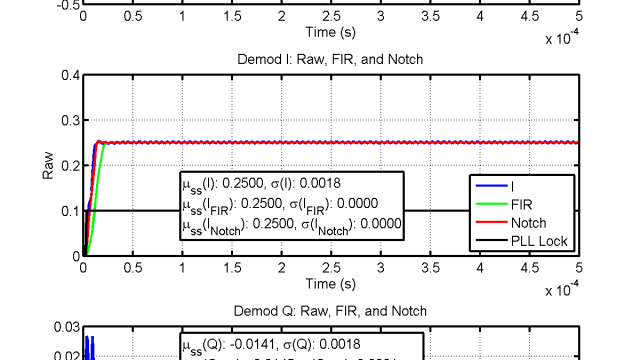
The Demod Squad: A Tutorial on the Utility and Methodologies for Using Modul...
47 min
Intermediate
Video
Theory
Video talk of the paper by the same name.
See More
Adaptive Control (Part I) — Hypersonics and the MIT Rule
Intermediate
Article / Blog
Theory
This blog post introduces the algorithm that ruled the adaptive flight control system of the first manned hypersonic aircraft, the North American X-15.
See More