


Converting Constrained Optimization to Unconstrained Optimization Using the ...
54 min
Beginner
Video
Theory
In this video we show how to convert a constrained optimization problem into an approximately equivalent unconstrained optimization problem using the penalty...
See More
Introduction to Classic Control Theory (Japanese)
Beginner
Video
Theory
A collection of video lectures by Yuki Nishimura covering an introduction to classic control theory.
See More
PID Explained
20 min
Beginner
Article / Blog
Theory
A qualitative explanation of P, I, & D actions using graphs.
See More
System Identification: DMD Control Example
8 min
Intermediate
Video
Theory
This lecture gives a Matlab example of dynamic mode decomposition with control (DMDc) for full-state system identification.
See More
Wind Tunnel Data Analysis and Testing Considerations
111 min
Intermediate
Video
Theory
This is the last video in our 3 part series on wind tunnel testing. In this video, we discuss what typical plots of wind tunnel data might look like and how to extract relevant information...
See More
Systems Engineering, Part 3: The Benefits of Functional Architectures
14 min
Beginner
Video
Theory
Functional, logical, and physical architectures are important tools for designing complex systems. We describe what architectures are and how they contribute to the early stages of a project...
See More
Model Identification and Adaptive Control - From Windsurfing to Telecommunic...
Beginner
Book
Theory
This book is based on a workshop entitled: "Model Identification and Adaptive Control: From Windsurfing to Telecommunications" held in Sydney, Australia, on December 16, 2000. The workshop...
See More
ENG 1718 - MODELAGEM DE SISTEMAS DINÂMICOS (Portuguese)
500 min
Beginner
Video
Theory
Vídeos do curso Modelagem de Sistemas Dinâmicos. Mais informações na página do curso: https://helonayala.github.io/teaching/2018-msd/
See More
DSP Lecture 1: Signals
66 min
Beginner
Video
Theory
This is a video lecture for ECSE-4530 Digital Signal Processing by Rich Radke, Rensselaer Polytechnic Institute.
See More
System Identification: Sparse Nonlinear Models with Control
8 min
Beginner
Video
Theory
This lecture explores an extension of the sparse identification of nonlinear dynamics (SINDy) algorithm to include inputs and control. The resulting SINDY with control (SINDYc) can be used...
See More
Fast chirp FMCW Radar in automotive applications
Advanced
Peer Reviewed Paper
Theory
FMCW (frequency-modulated continuous wave radar) modulations have been popularly implemented in the automotive radar applications. This document demonstrates system requirement for a new...
See More
Robust Control, Part 3: Disk Margins for MIMO Systems
16 min
Beginner
Video
Theory
This video shows how margin can be used to assess the robustness of multi-input, multi-output systems. We’ll show how disk margin is a more complete way to represent margin for MIMO systems...
See More
3D Kinematics, Free Falling, Reference Frames
53 min
Intermediate
Video
Theory
Walter Lewin is one of the most reputed professors and was a former lecturer at MIT. His free to watch series on YouTube titled 8.01 is an excellent one for undergrads and high school...
See More
Intro to Data Science: Answering Questions with Data
6 min
Beginner
Video
Theory
This lecture describes the central aspect of data science: asking and answering questions with data. In particular, we discuss the thought process and progression of questions one might ask...
See More
So You Want to be a Systems Engineer
53 min
Beginner
Video
Theory
A presentation by Gentry Lee on what qualities and characteristics make a great systems engineer. At the time of the presentation, Gentry Lee was the Chief Engineer for the Solar System...
See More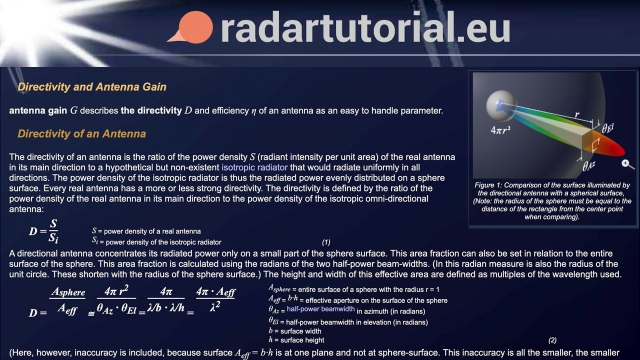
Directivity and Antenna Gain - radartutorial.eu
Beginner
Article / Blog
Theory
This page describes antenna directivity and gain. The directivity of an antenna is the ratio of the power density S (radiant intensity per unit area) of the real antenna in its main...
See More
Data-Driven Control: Linear System Identification
20 min
Beginner
Video
Theory
Overview lecture on linear system identification and model reduction. This lecture discusses how we obtain reduced-order models from data that optimally capture input--output dynamics.
See More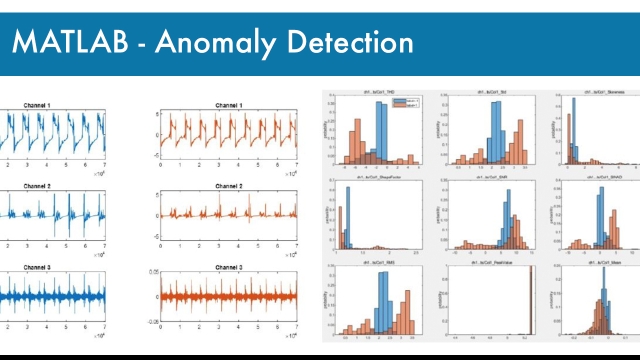
MATLAB Discovery Page - Anomaly Detection
Beginner
Article / Blog
Theory
Anomaly detection is the process of identifying events or patterns that differ from expected behavior. Anomaly detection can range from simple outlier detection to complex machine learning...
See More
The Braitenberg Vehicles
15 min
Beginner
Video
Theory
This video explores the world of simple logical robots as described by Valentino Braitenberg in his book Vehicles, Experiments in Synthetic Psychology. With very simple linkages between...
See More
Adaptive Control (Part II) —Modeling the X-15’s Adaptive Flight Control Syst...
Intermediate
Article / Blog
Theory
This blog post shows how to build from scratch a Simulink model of the famous MH-96, the X-15's Adaptive Flight Control System
See More
The Linear Quadratic Regulator (LQR)
Intermediate
Article / Blog
Theory
Lecture notes for ECE717 on LQR control by Laurent Lessard. There is a section that shows how the Algebraic Riccati Equation is part of the LQR solution by "completing the square".
See More
Robust Control, Part 4: Working with Parameter Uncertainty
13 min
Beginner
Video
Theory
The previous two videos showed a few different ways to quantify how robust a system is to model and plant uncertainty by looking at how much input and output variation it can handle before...
See More
Vibrational control of nonlinear systems: Vibrational controllability and tr...
Intermediate
Peer Reviewed Paper
Theory
In the first part of this work, the criteria for the existence of stabilizing parametric oscillations have been derived. In the present paper, the problem of choosing the stabilizing...
See More
Solving Systems of Equations Using the Optimization Penalty Method
44 min
Beginner
Video
Theory
In this video we show how to solve a system of equations using numerical optimization instead of analytically solving. We show that this can be applied to e...
See More
Toys for Control Education
Intermediate
App
Theory
Teaching materials for control engineering education that run in web browsers. Speed control, position control, step response of 2nd order system, pole and impulse response, and rocket.
See More