

Building a Matlab/Simulink Model of an Aircraft: the Research Civil Aircraf...
51 min
Intermediate
Video
Theory
In this video we implement the RCAM model as a Matlab script that is called from a Simulink model. The result is a fully encapsulated Simulink model of a nonlinear, 6 DOF aircraft. Please...
See More
Trimming a Model of a Dynamic System Using Numerical Optimization
60 min
Beginner
Video
Theory
In this video we show how to find a trim point of a dynamic system using numerical optimization techniques. We generate a cost function that corresponds to ...
See More
Control Systems with MATLAB - Root Locus
31 min
Beginner
Video
Theory

Root Locus Plot: Common Questions and Answers
17 min
Beginner
Video
Theory
In this video I go through some of the common questions I've received on my other root locus videos. 1) Why do we call the poles of a system the roots?2) How do I plot the damping ratio...
See More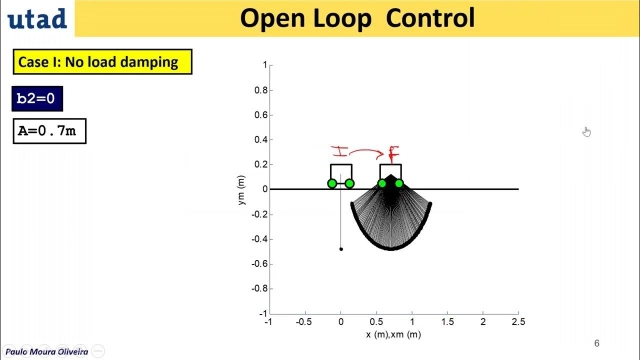
Posicast Control -3 - ( In English )
8 min
Beginner
Video
Theory
In this video a Gantry-Crane control simulation problem is introduced. The problem is presented and some introductory simulations are shown.
See More
Controllability of a Linear System: The Controllability Matrix and the PBH T...
97 min
Beginner
Video
Theory
In this video we explore controllability of a linear system. We discuss two methods to test for controllability, the controllability matrix as well as the P...
See More
Control Systems with MATLAB - Modelling
27 min
Beginner
Video
Theory

Frequency domain – tutorial 8: frequency spectra
9 min
Beginner
Video
Theory
In this video, we learn about frequency spectra which can be divided into two parts: phase and magnitude spectrum. Some examples will be provided to practice...
See More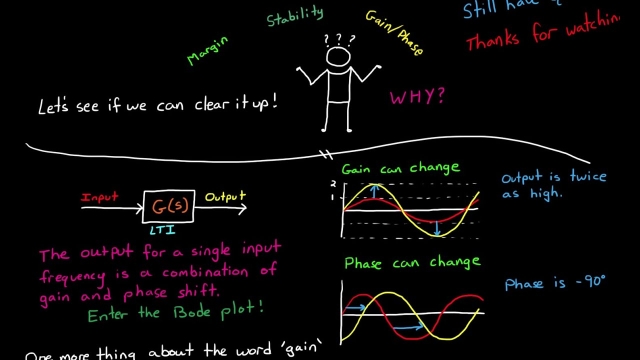
Gain and Phase Margins Explained!
13 min
Beginner
Video
Theory
In this video I explain gain and phase margins. If you are confused by this topic I hope this video will help tie all of the concepts together that go into understanding what gain and phase...
See More
Transfer Functions: Introduction and Implementation
53 min
Beginner
Video
Theory
In this video we introduce transfer functions and show how they can be derived from a set of linear, ordinary differential equations. We also examine how to...
See More
Frequency domain – tutorial 11: equalization
11 min
Beginner
Video
Theory
In this video, we learn about equalization technique which is used in communication systems to compensate for the destructive effect of the channel between t...
See More
Control Systems Lectures - Transfer Functions
11 min
Beginner
Video
Theory
This lecture describes transfer functions and how they are used to simplify modeling of dynamic systems.
See More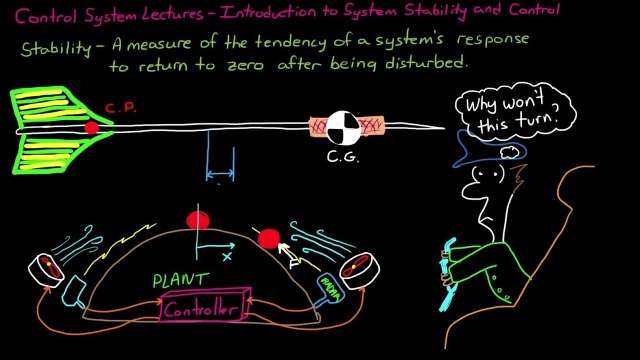
Introduction to System Stability and Control
11 min
Beginner
Video
Theory
This video attempts to provide an intuitive understanding of concepts like stability and stability margin. I briefly describe both of these topics with examples and explain how you can...
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 1 - Introduct...
66 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Designing a Lag Compensator with Root Locus
11 min
Beginner
Video
Theory
This video walks through a phase lag compensator example using the Root Locus method.
See More![Controllability, Reachability, and Eigenvalue Placement [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_304.jpg?itok=qj48C5IZ)
Controllability, Reachability, and Eigenvalue Placement [Control Bootcamp]
10 min
Beginner
Video
Theory
This lecture explains the equivalence of controllability, reachability, and the ability to arbitrarily place eigenvalues of the closed loop system.
See More
RL Course by David Silver - Lecture 7: Policy Gradient Methods
94 min
Intermediate
Video
Theory
Looks at different policy gradients, including Finite Difference, Monte-Carlo and Actor Critic.
See More
SVD and Alignment: A Cautionary Tale
7 min
Intermediate
Video
Theory
This video describes the importance of data alignment when performing the singular value decomposition (SVD). Translations and rotations both present challenges for the SVD.
See More
Understanding Sensor Fusion and Tracking, Part 2: Fusing a Mag, Accel, and G...
16 min
Beginner
Video
Theory
This video describes how we can use a magnetometer, accelerometer, and a gyro to estimate an object’s orientation. The goal is to show how these sensors contribute to the solution, and to...
See More
Data-Driven Control: Eigensystem Realization Algorithm
12 min
Intermediate
Video
Theory
In this lecture, we introduce the eigensystem realization algorithm (ERA), which is a purely data-driven algorithm to obtain balanced input—output models from impulse response data. ERA was...
See More
Kalman Filter Tutorial
Beginner
Article / Blog
Theory
The Kalman Filter is an easy topic. However, many tutorials are not easy to understand. Most require extensive mathematical background which makes them difficult to understand. Also, most...
See More
Peter Ponders PID, Natural Frequency vs Frequency of Acceleration
9 min
Beginner
Video
Theory
This video is intended for servo hydraulic system designers and those that program hydraulic servo systems but it does show how several of the techniques sho...
See More
IMC PID Design of a Second Order Process
8 min
Beginner
Video
Theory
IMC PID Design of a Second Order Process
See More
Discrete-Time Dynamical Systems
9 min
Intermediate
Video
Theory
This video shows how discrete-time dynamical systems may be induced from continuous-time systems.
See More
Peter Ponders PID - Observers/Estimators
26 min
Beginner
Video
Theory