


Understanding PID Control, Part 4: A PID Tuning Guide
12 min
Beginner
Video
Theory
It can be difficult to navigate all the resources that promise to explain the secrets of PID tuning. Some proclaim that PID tuning is an art that requires finesse and experience, while...
See More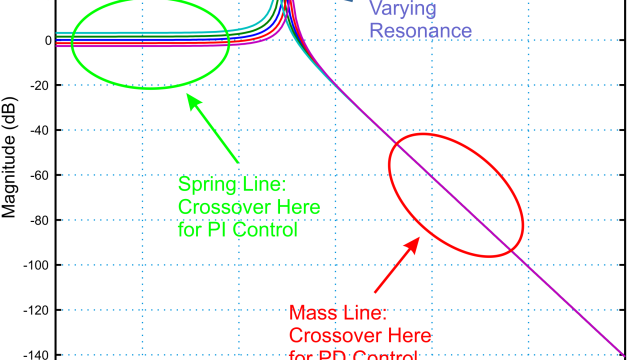
What's a Control System and Why Should I Care? A whirlwind tour through the ...
60 min
Beginner
Article / Blog
Theory
This paper aims to provide some introduction, a cheat sheet, and some context for college level STEM students about to take that first controls class. In some cases, it provides context...
See More
Linear Algebra Review
Intermediate
Course
Theory
This short course is a quick review of linear algebra, intended for students who have already taken a previous course in linear algebra or have some experience with vectors and matrices. The...
See More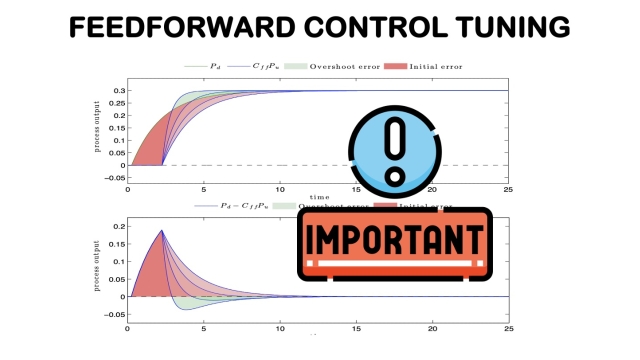
Advances in feedforward control for measurable disturbances
35 min
Intermediate
Video
Theory
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See More")
Machine Learning Control: Tuning a PID Controller with Genetic Algorithms (P...
9 min
Beginner
Video
Theory
This lecture shows how to use genetic algorithms to tune the parameters of a PID controller. Tuning a PID controller with genetic algorithms is not generally recommended, but is used to...
See More
Reinforcement Learning for Engineers, Part 3: Policies and Learning Algorith...
17 min
Beginner
Video
Theory
This video provides an introduction to the algorithms that reside within the agent. We’ll cover why we use neural networks to represent functions and why you may have to set up two neural...
See More
Modeling Physical Systems, An Overview
7 min
Beginner
Video
Theory
This video sets the stage for the topics that I want to cover over the next month or two. This is an overview of how you go from a physical system to a linear model where you can design a...
See More
Discrete Fourier Transform
Intermediate
Article / Blog
Theory
The discrete Fourier transform, or DFT, is the primary tool of digital signal processing. The foundation of the product is the fast Fourier transform (FFT), a method for computing the DFT...
See More
Control Systems in Practice, Part 9: The Step Response
15 min
Beginner
Video
Theory
This video covers a few interesting things about the step response. We’ll look at what a step response is and some of the ways it can be used to specify design requirements for closed loop...
See More
What Are Dynamic Models? Chapter 1 from Dynamic Models in Biology
Beginner
Book
Theory
Throughout this book we use a wide-ranging set of case studies to illustrate different aspects of models and modeling. In this introductory chapter we describe and give examples of different...
See More
Systems Engineering, Part 1: What Is Systems Engineering?
15 min
Beginner
Video
Theory
This video covers what systems engineering is and why it’s useful. We will present a broad overview of how systems engineering helps us develop complex projects that meet the program...
See More
How Simulations Work
30 min
Beginner
Article / Blog
Theory
This article sets out the critical aspects of building good simulations — that is, simulations that are accurate, easy to develop and analyze, and fast. The first sections deal with how a...
See More
Data-Driven Dynamical Systems Overview
21 min
Intermediate
Video
Theory
This video provides a high-level overview of this new series on data-driven dynamical systems. In particular, we explore the various challenges in modern dynamical systems, along with...
See More
Guaranteed Margins for LQR Regulators
10 min
Intermediate
Peer Reviewed Paper
Theory
John Doyle's famous paper! He presents a counterexample that shows that are no guaranteed margins for LQG systems.
See More
Manuscript about ITISE: an Interactive Software Tool for System Identificati...
Intermediate
Peer Reviewed Paper
Theory
The paper describes the conceptual basis, main features and functionality of an interactive software tool developed in support of system identification education and discovery.
This...
See More
MATLAB toolbox for control 101 course
Beginner
Software
Theory
Community toolbox project led by Anthony Rossiter and sponsored by MathWorks. The project incorporates input from various international collaborators. The aim is to make the developed...
See More
Process Dynamics and Control Course
Beginner
Course
Theory
This course focuses on a complete start to finish process of physics-based modeling, data driven methods, and controller design. Although some knowledge of computer programming is required...
See More
Machine Learning & Text Processing Lectures
Beginner
Video
Theory
This is the video lecture collection by Victor Lavrenko.
See More
Discrete control #4: Discretize with the matched method
14 min
Beginner
Video
Theory
This is the fourth video on discrete control and in this video we are going to continue exploring the different techniques we can use to discretize a continuous system and talk about the...
See More
Control Systems in Practice, Part 4: Why Time Delay Matters
15 min
Beginner
Video
Theory
Time delays exist in two varieties: signal distorting delays, like phase lag, in which each frequency is delayed by a different amount of time, resulting in a distorted signal shape; and non...
See More
Advances in feedforward control for measurable disturbances (in Spanish)
60 min
Intermediate
Video
Theory
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See More")
Koopman Spectral Analysis (Control)
15 min
Intermediate
Video
Theory
In this video, we explore extensions of Koopman theory for control systems. Much of the excitement and promise of Koopman operator theory is centered around the ability to represent...
See More
Nyquist Stability Criterion, Part 2
18 min
Beginner
Video
Theory
An explanation of the Nyquist Stability Criterion part 2. This video steps through the how to sketch a Nyquist plot by hand, what to do if there are open loop pools on the imaginary axis...
See More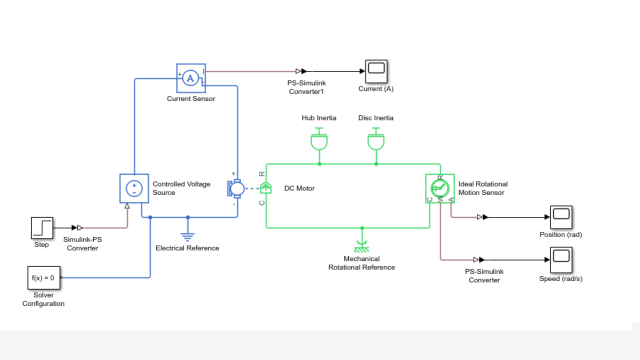
Using Simscape™ to Model a Quanser QUBE-Servo 2 with Friction
15 min
Intermediate
Article / Blog
Theory
Modelling a DC servomotor is one of the common examples used in control system textbooks and courses. Given that so many systems use DC motors, e.g. robot manipulator arms, it’s an important...
See More
How Kalman Filters Work, Part 1
30 min
Beginner
Article / Blog
Theory
This article looks at four popular estimation filter architectures: particle filter, sigma point filter, extended Kalman filter, and the Kalman filter. It discusses how all four of these...
See More