


Feedforward Control Introduction
6 min
Beginner
Video
Theory
I introduce feedforward control (FFC) and describe how it can be used to minimize the difference between an output's setpoint and measured value (the error o...
See More
RL Course by David Silver - Lecture 10: Classic Games
111 min
Intermediate
Video
Theory
An overview of Game Theory, minimax search, self-play and imperfect information games.
See More
Control systems with non-minimum phase dynamics
8 min
Beginner
Video
Theory
This video describes control systems that have non-minimum phase dynamics, characterized by a zero of the input--output transfer function in the right-half-plane. Physically, these systems...
See More
Frequency Response Analysis FRA and the Amplitude Ratio and Phase Angle
12 min
Beginner
Video
Theory
Process engineers model output response to inputs that oscillate via frequency response analysis (FRA). In this video, I'll go over amplitude ratios and phas...
See More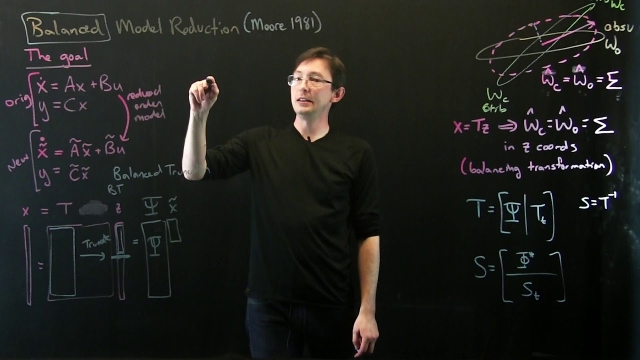
Data-Driven Control: Balanced Truncation
14 min
Intermediate
Video
Theory
In this lecture, we describe the balanced truncation procedure for model reduction, where a handful of the most controllable and observable state directions are kept for the reduced-order...
See More
Numerically Calculating Partial Derivatives
59 min
Beginner
Video
Theory
In this video we discuss how to calculate partial derivatives of a function using numerical techniques. In other words, these partials are calculated withou...
See More
Introduction to Full State Feedback Control
62 min
Beginner
Video
Theory
In this video we introduce the concept of a full state feedback controller. We discuss how to use this system to place the eigenvalues of the closed loop sys...
See More
Peter Ponders PID - Feed Forward Theory and Calculations
6 min
Beginner
Video
Theory

Understanding Sensor Fusion and Tracking, Part 5: How to Track Multiple Obje...
15 min
Beginner
Video
Theory
This video describes two common problems that arise when tracking multiple objects: data association and track maintenance. We cover a few ways to solve these issues and provide a general...
See More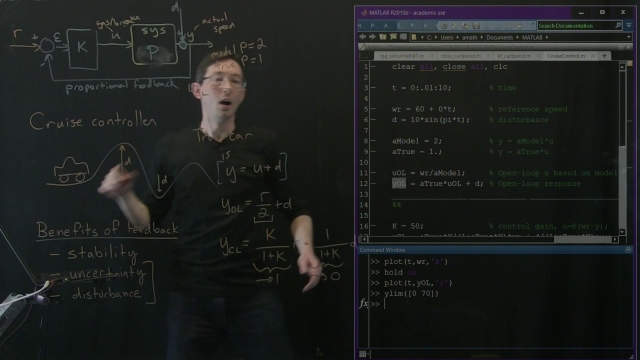
Control Bootcamp: Benefits of Feedback on Cruise Control Example (Part 2)
11 min
Beginner
Video
Theory
Here we investigate the benefits of feedback for systems with uncertain dynamics and disturbances, as illustrated on a cruise control example. (Part 2)
See More
The Fourier Transform
14 min
Beginner
Video
Theory
This video will discuss the Fourier Transform, which is one of the most important coordinate transformations in all of science and engineering.
See More
Derivation and Solution of Laplace’s Equation
33 min
Beginner
Video
Theory
In this video we show how the heat equation can be simplified to obtain Laplace’s equation. We investigate how to solve Laplace’s equation using separation ...
See More
Designing a Lag Compensator with Bode Plot
13 min
Beginner
Video
Theory
This video walks through a phase lag compensator example using the Bode Plot method.
See More
Lecture 29: State space representation
29 min
Beginner
Video
Theory
")
Frequency domain – tutorial 1: concept of frequency (with Chinese subtitle)
9 min
Beginner
Video
Theory
In this video, the following materials are covered:1) intuitive explanation on the frequency concept 2) what is the relation between time and frequency domai...
See More
Euler (Gimbal Lock) Explained
8 min
Beginner
Video
Theory
In this video we explore Euler Rotations, the most common method for orienting objects in 3d. It's by-product "gimbal lock" can cause headaches for animators because the animated motion can...
See More
Lecture 19: Lead and PD compensator Design using Root Locus
54 min
Beginner
Video
Theory

Frequency domain – tutorial 5: Fourier transform
9 min
Beginner
Video
Theory
In this video, we learn about Fourier transform which enables us to travel from time to frequency domain when a signal is not periodic. The learning objectiv...
See More
Why Transfer Functions Matter
5 min
Beginner
Video
Theory
Once we know a process's transfer function we can model how it will respond to an variety of inputs very easily, check it out.
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 4 - Model Fre...
78 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 16 - Monte Ca...
67 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Understanding Model Predictive Control, Part 2: What is MPC?
6 min
Beginner
Video
Theory
Learn how model predictive control (MPC) works. Using a simple car example, this video provides insight into an MPC controller’s strategy for finding the optimal steering wheel angle to...
See More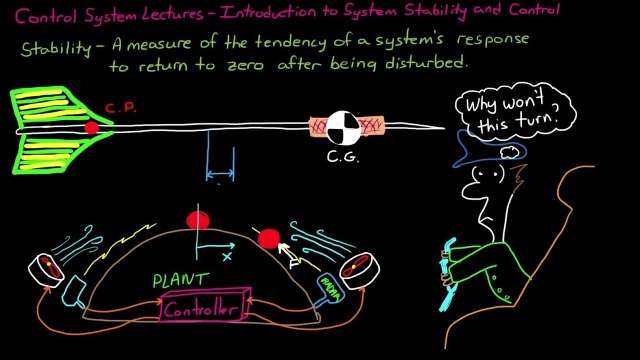
Introduction to System Stability and Control
11 min
Beginner
Video
Theory
This video attempts to provide an intuitive understanding of concepts like stability and stability margin. I briefly describe both of these topics with examples and explain how you can...
See More
Visually Determining Transfer Functions
6 min
Beginner
Video
Theory
Process Control classes can get pretty hard to follow when you lose sight of what transfer functions really are. How do you get them in the first place?
See More
Smart Projectile State Estimation Using Evidence Theory
Intermediate
Peer Reviewed Paper
Theory
This journal article provides a very good practical understanding of Dempster-Shafer theory using sensor fusion and state estimation as the backdrop.
See More