


Controlling Robotic Swarms
13 min
Beginner
Video
Theory
Come with me to the Robotics, Aerospace, and Information Networks lab at the University of Washington to learn the basics of swarm robotics. Find out how simple distributed algorithms can...
See More
Autonomous Navigation, Part 3: Understanding SLAM Using Pose Graph Optimizat...
16 min
Beginner
Video
Theory
This video provides some intuition around Pose Graph Optimization—a popular framework for solving the simultaneous localization and mapping (SLAM) problem in autonomous navigation.
We’ll...
See More
PID Explained
20 min
Beginner
Article / Blog
Theory
A qualitative explanation of P, I, & D actions using graphs.
See More
Fast chirp FMCW Radar in automotive applications
Advanced
Peer Reviewed Paper
Theory
FMCW (frequency-modulated continuous wave radar) modulations have been popularly implemented in the automotive radar applications. This document demonstrates system requirement for a new...
See More
3D Kinematics, Free Falling, Reference Frames
53 min
Intermediate
Video
Theory
Walter Lewin is one of the most reputed professors and was a former lecturer at MIT. His free to watch series on YouTube titled 8.01 is an excellent one for undergrads and high school...
See More
Intro to Data Science: Answering Questions with Data
6 min
Beginner
Video
Theory
This lecture describes the central aspect of data science: asking and answering questions with data. In particular, we discuss the thought process and progression of questions one might ask...
See More
Advanced process control (APC): Theory & Applications in SAGD
Intermediate
Video
Theory
This webinar is presented by Thiago Avila and covers what APC is, why we do it, examples of APC in the SAGD industry, what optimization opportunities are available, and where this technology...
See More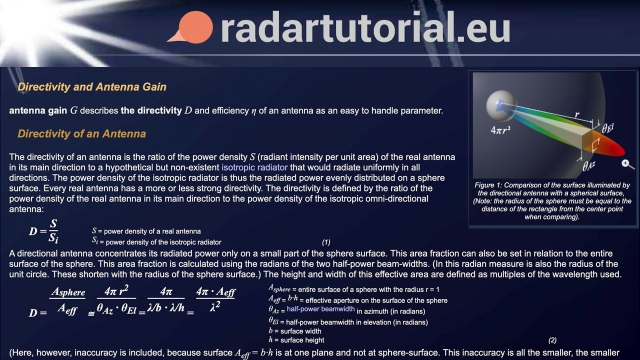
Directivity and Antenna Gain - radartutorial.eu
Beginner
Article / Blog
Theory
This page describes antenna directivity and gain. The directivity of an antenna is the ratio of the power density S (radiant intensity per unit area) of the real antenna in its main...
See More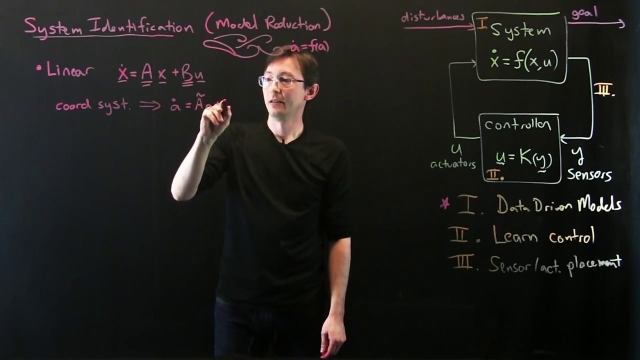
Data-Driven Control: Linear System Identification
20 min
Beginner
Video
Theory
Overview lecture on linear system identification and model reduction. This lecture discusses how we obtain reduced-order models from data that optimally capture input--output dynamics.
See More
System Identification: Dynamic Mode Decomposition with Control
11 min
Intermediate
Video
Theory
This lecture provides an overview of dynamic mode decomposition with control (DMDc) for full-state system identification. DMDc is a least-squares regression technique based on the singular...
See More
Systems Engineering, Part 5: Some Benefits of Model-Based Systems Engineerin...
12 min
Beginner
Video
Theory
Learn how model-based systems engineering (MBSE) can help you cut through the chaos of early systems development and get you from definition to execution more seamlessly.
You’ll hear the...
See More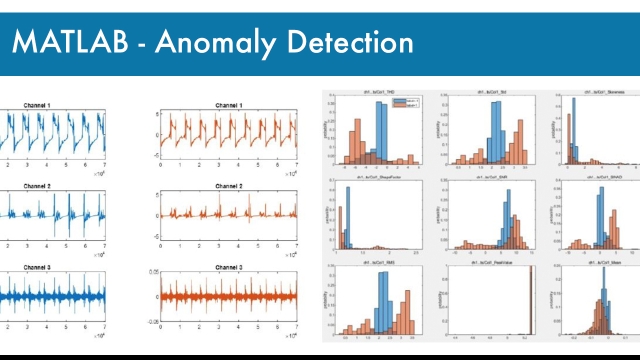
MATLAB Discovery Page - Anomaly Detection
Beginner
Article / Blog
Theory
Anomaly detection is the process of identifying events or patterns that differ from expected behavior. Anomaly detection can range from simple outlier detection to complex machine learning...
See More
Machine Learning Control: Overview
10 min
Beginner
Video
Theory
This lecture provides an overview of how to use machine learning optimization directly to design control laws, without the need for a model of the dynamics.
See More
The Linear Quadratic Regulator (LQR)
Intermediate
Article / Blog
Theory
Lecture notes for ECE717 on LQR control by Laurent Lessard. There is a section that shows how the Algebraic Riccati Equation is part of the LQR solution by "completing the square".
See More
Control Bootcamp: Introduction to Robust Control
8 min
Beginner
Video
Theory
This video motivates robust control with the famous 1978 paper by John Doyle, titled "Guaranteed Margins for LQG Regulators"... Abstract: There are none.
See More
Vibrational control of nonlinear systems: Vibrational controllability and tr...
Intermediate
Peer Reviewed Paper
Theory
In the first part of this work, the criteria for the existence of stabilizing parametric oscillations have been derived. In the present paper, the problem of choosing the stabilizing...
See More
Model Reference Adaptive Control Fundamentals (Dr. Tansel Yucelen)
91 min
Beginner
Video
Theory
Forum on Robotics & Control Engineering (FoRCE, http://force.eng.usf.edu/) Seminar Series: "Model Reference Adaptive Control Fundamentals" (Dr. Tansel Yucelen)
See More
Wind Tunnel Testing: Introduction and Data Acquisition
28 min
Intermediate
Video
Theory
This is the first of our 3 part series on wind tunnel testing. In this video, we introduce the concept of wind tunnel testing as well as discuss the process for acquiring aerodynamic data in...
See More
What are Phased Arrays?
17 min
Beginner
Video
Theory
This video introduces the concept of phased arrays. An array refers to multiple sensors, arranged in some configuration, that act together to produce a desired sensor pattern. With a phased...
See More
Machine Learning: What is easy, medium, and hard?
38 min
Beginner
Video
Theory
This video gives a brief overview of what is easy, medium, and hard in machine learning, explored through case studies. Progress in machine learning is rapidly advancing, and changing the...
See More
Sparse Identification of Nonlinear Dynamics for Model Predictive Control
12 min
Intermediate
Video
Theory
This lecture shows how to use sparse identification of nonlinear dynamics with control (SINDYc) with model predictive control to control nonlinear systems purely from data.
See More
State Space in Process Control
10 min
Beginner
Video
Theory
An overview on how we can derive a state space model from a given set of state variables and inputs, as well as an intro to deviation variables. This is part...
See More
RL Course by David Silver - Lecture 1: Introduction to Reinforcement Learnin...
88 min
Intermediate
Video
Theory
Introduces reinforcment learning (RL), an overview of agents and some classic RL problems.
See More
Data Preprocessing and the Short-Time Fourier Transform | Deep Learning for ...
16 min
Beginner
Video
Theory
Data in its raw form might not be ideal for training a network. There are some changes we can make to the data that are often desired or sometimes necessary in order to make training faster...
See More![Controllability and the Discrete-Time Impulse Response [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_302.jpg?itok=xjXmM9_U)
Controllability and the Discrete-Time Impulse Response [Control Bootcamp]
5 min
Beginner
Video
Theory
This lecture derives the impulse response for a discrete-time system and relates this to the controllability matrix.
See More