

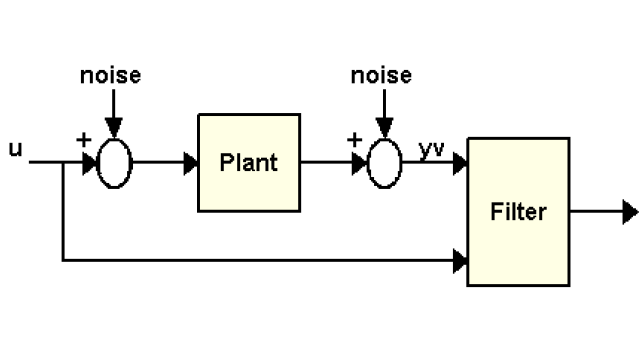
Kalman Filter Design
30 min
Intermediate
Article / Blog
Application
This example shows how to perform Kalman filtering. Both a steady state filter and a time varying filter are designed and simulated.
See More
Introduction to Noise Filtering
20 min
Intermediate
Article / Blog
Application
Introduction to filtering - moving average, first-order, anti-aliasing, set point softening
See More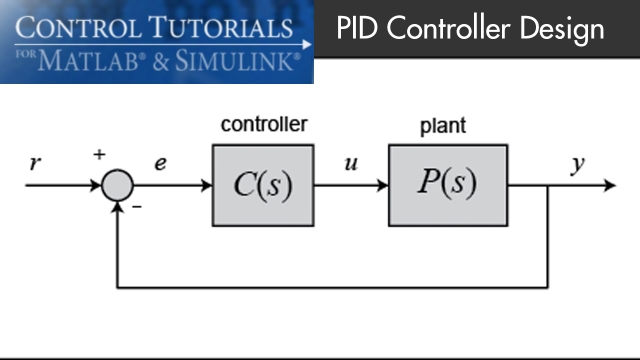
Introduction: PID Controller Design
30 min
Beginner
Article / Blog
Application
In this tutorial we will introduce a simple, yet versatile, feedback compensator structure: the Proportional-Integral-Derivative (PID) controller. The PID controller is widely employed...
See More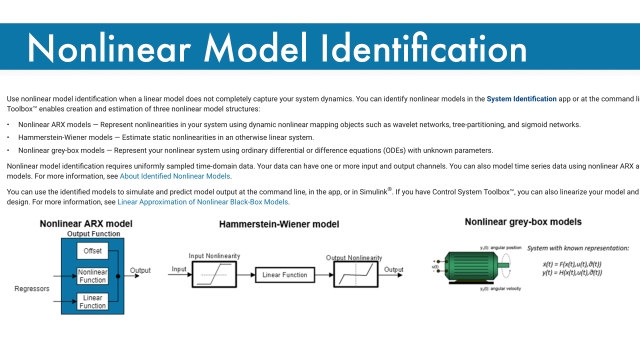
Nonlinear Model Identification
Intermediate
Article / Blog
Application
Mathwork overview page describing nonlinear model identification. Use nonlinear model identification when a linear model does not completely capture your system dynamics. You can identify...
See More
Improving the Beginner's PID - Introduction
30 min
Beginner
Article / Blog
Application
In conjunction with the release of the new Arduino PID Library Brett has released this series of posts that explain his PID code. He start's with what he call's “The Beginner’s PID.” He...
See More
Road Sign Detection using Transfer Learning on RetinaNet
15 min
Intermediate
Article / Blog
Application
This blog outlines a number of open-source resources for transfer learning that are worthy of exploring, ands show the result of using transfer learning on RetinaNet to develop a road sign...
See More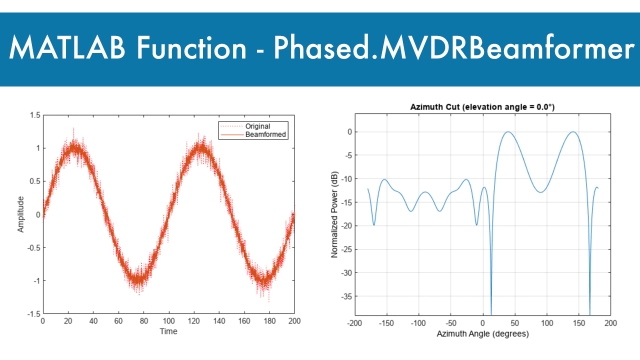
MATLAB Function: phased.MVDRBeamformer
Intermediate
Article / Blog
Application
The phased.MVDRBeamformer System object™ implements a narrowband minimum-variance distortionless-response (MVDR) beamformer. The MVDR beamformer is also called the Capon beamformer. An MVDR...
See More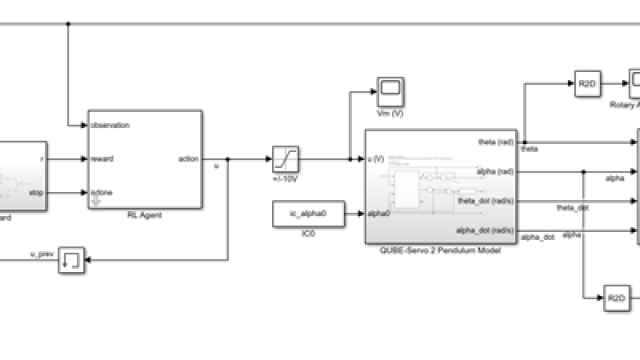
Using the Reinforcement Learning Toolbox™ to Balance an Inverted Pendulum
30 min
Intermediate
Article / Blog
Application
Reinforcement learning (RL) is a subset of Machine Learning that uses dynamic data, not static data like unsupervised learning or supervised learning. Reinforcement learning is used in many...
See More
TCLab PID Control
60 min
Intermediate
Article / Blog
Application
Implement a PID controller on the Temperature Control Lab hardware to drive the temperature from room temperature to 60 degrees C. This resource lets you attempt the design yourself first...
See More
Post-Pandemic: A Hybrid Lab Experience
Beginner
Article / Blog
Application
This article discusses the importance of a hybrid laboratory model, blending physical hardware with digital twins. Example using the Quanser Interactive Lab (QLabs) platform is given.
See More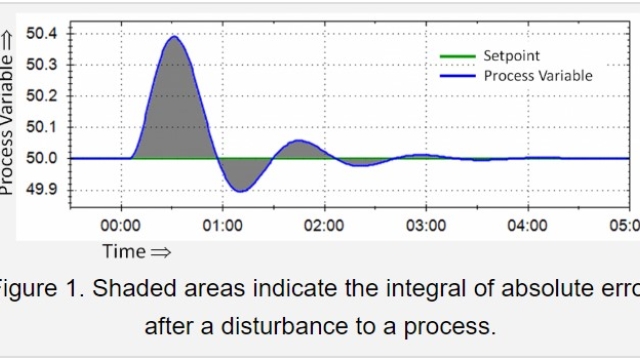
Min IAE Tuning
15 min
Intermediate
Article / Blog
Application
Procedure and Commentary on tuning for minimum Integral of the Absolute Error
See More
Tuning PID Controllers
20 min
Intermediate
Article / Blog
Application
Tuning controllers is the procedure for choosing the coefficient values for the P, I and D modes. It must be simple to execute, fast, and non-disruptive to the operating process. Heuristic...
See More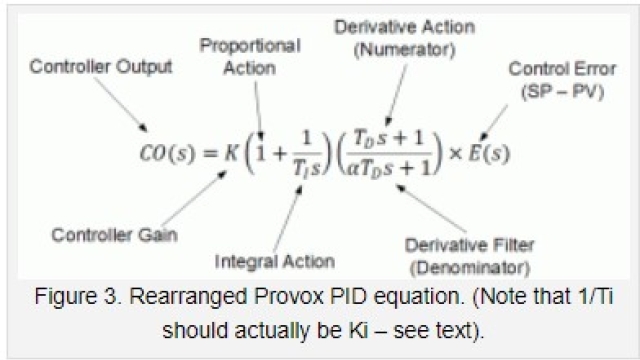
Decoding a Laplace Representation of a Controller
20 min
Intermediate
Article / Blog
Application
A how to relate the Laplace notation to the PID controller variation and features
See More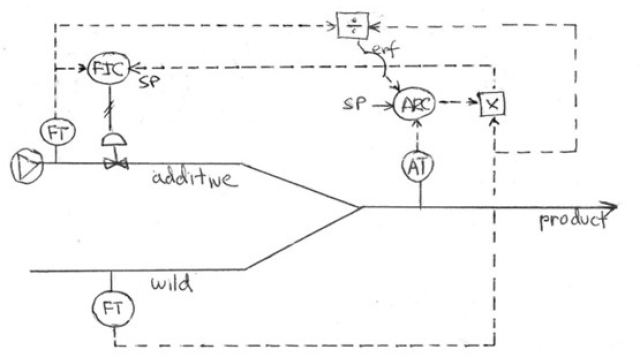
Ratio Control and Scaled Signal Calculations
15 min
Intermediate
Article / Blog
Application
When and how to use Ratio Control and use Scaled Signals
See More
PID Controller Variations
20 min
Intermediate
Article / Blog
Application
It is important to understand the variations on the PID algorithm when tuning and when choosing a version that is consistent within your use context. Unfortunately, there are many names for...
See More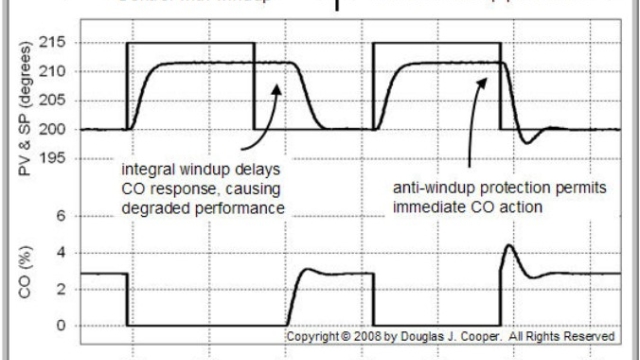
Integral Wind-Up and Solution
Intermediate
Article / Blog
Application
What is integral wind-up and how velocity mode solves it.
See More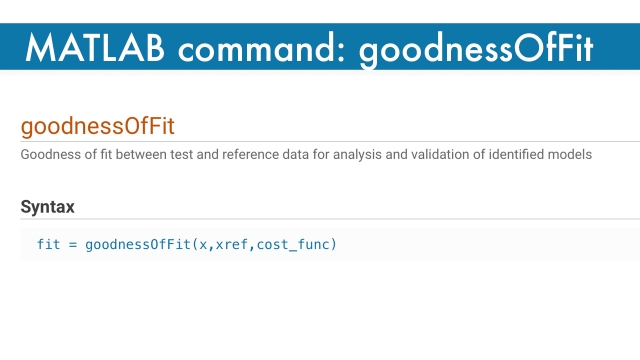
MATLAB Command: goodnessOfFit
Intermediate
Article / Blog
Application
Goodness of fit between test and reference data for analysis and validation of identified models
See More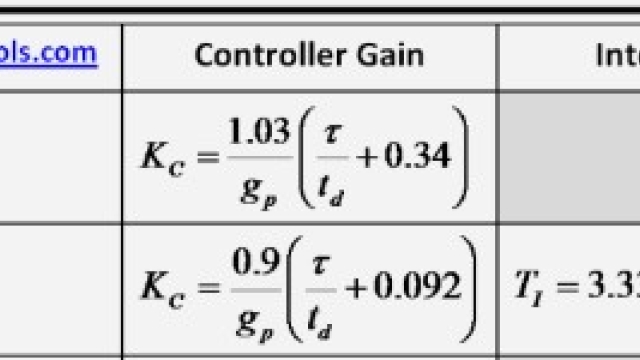
Cohen-Coon Tuning
15 min
Intermediate
Article / Blog
Application
A procedure and commentary on this tuning approach that includes deadtime.
See More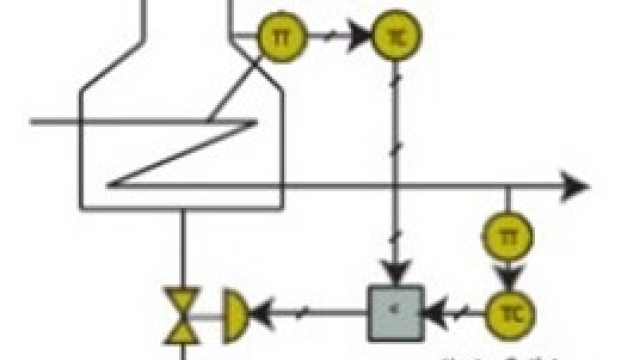
Override and Reset Feedback
15 min
Intermediate
Article / Blog
Application
Override controllers are for safety or switching to auxiliary variables. The non-selected controller needs to prevent becoming wound up.
See More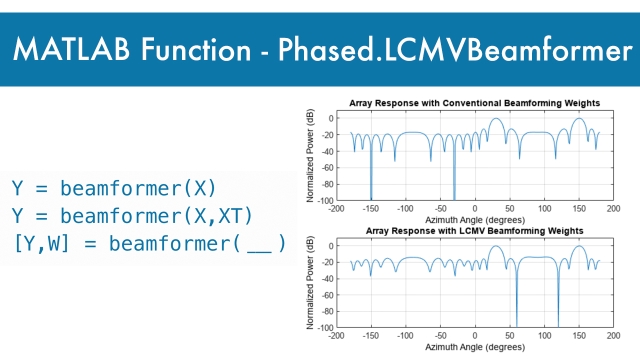
MATLAB function: phased.LCMVBeamformer
Intermediate
Article / Blog
Application
The phased.LCMVBeamformer object implements a narrowband linear-constraint minimum-variance (LCMV) beamformer for a sensor array. The LCMV beamformer belongs to the family of constrained...
See More
Control Valve Problems
20 min
Intermediate
Article / Blog
Application
Control valve problems can severely affect control loop performance and, unless eliminated, they can make controller tuning a challenging (sometimes impossible) task. Some problems are quite...
See More
Cascade Control
15 min
Intermediate
Article / Blog
Application
When and how to use Cascade Control
See More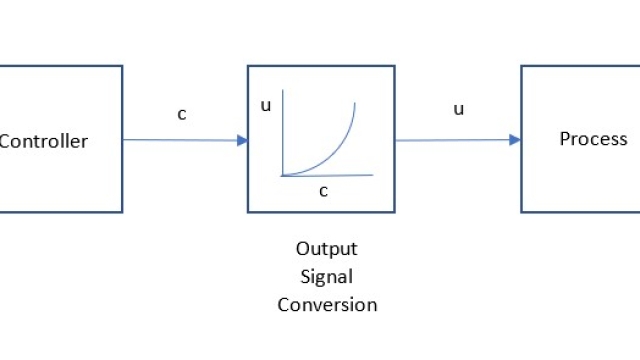
Nonlinear Control Output Signal Characterization
15 min
Intermediate
Article / Blog
Application
If the process gain makes large changes over the operating range, then tuning PID (or other linear) controllers is difficult. If tuned for one region, the controller is undesirably sluggish...
See More
Bumpless Transfer and Tuning
15 min
Intermediate
Article / Blog
Application
Switching from MAN to AUTO mode or LOCAL to CASCADE or changing the controller integral time should not cause a change in the controller output, a bump. But a primitive coding of the PID...
See More
Introduction to the A* Algorithm
15 min
Beginner
Article / Blog
Application
An interactive visual explanation of the A* algorithm using motivating examples from computer games.
See More