


Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 16 - Monte Ca...
67 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
Expressing Vectors in Different Frames Using Rotation Matrices
45 min
Intermediate
Video
Theory
In this video we develop notation to express a vector in different reference/coordinate frames. We then investigate how to use rotation matrices to translate from a vector expressed in one...
See More
Manipulating Aerodynamic Coefficients
25 min
Intermediate
Video
Theory
In this video we discuss some potential problems you may encounter when attempting to perform operations with dimensionless aerodynamic coefficients such as CL and CD.
See More
Data-Driven Control: Balanced Truncation Example
10 min
Intermediate
Video
Application
In this lecture, we explore the balanced truncation procedure on an example in Matlab. In particular, we demonstrate the ability of a balancing transformation to make the controllability...
See More
Discrete-Time Dynamical Systems
9 min
Intermediate
Video
Theory
This video shows how discrete-time dynamical systems may be induced from continuous-time systems.
See More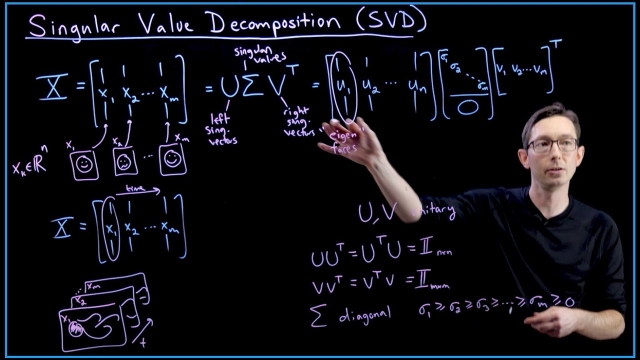
Singular Value Decomposition (SVD): Mathematical Overview
12 min
Intermediate
Video
Theory
This video presents a mathematical overview of the singular value decomposition (SVD).
See More![Unitary Transformations and the SVD [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_428.jpg?itok=YznjC6fr)
Unitary Transformations and the SVD [Python]
6 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) is related to unitary transformations, with Python code.
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 3 - Model-Fr...
73 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

RL Course by David Silver - Lecture 4: Model-Free Prediction
97 min
Intermediate
Video
Theory
An introduction to Monte-Carlo Learning and Temporal Difference Learning
See More
Building a Matlab/Simulink Model of an Aircraft: the Research Civil Aircraf...
51 min
Intermediate
Video
Theory
In this video we implement the RCAM model as a Matlab script that is called from a Simulink model. The result is a fully encapsulated Simulink model of a nonlinear, 6 DOF aircraft. Please...
See More
Computing Euler Angles: The Euler Kinematical Equations and Poisson’s Kinema...
79 min
Intermediate
Video
Theory
In this video we discuss how the time rate of change of the Euler angles are related to the angular velocity vector of the vehicle. This allows us to design an algorithm to consume...
See More
Data-Driven Control: Change of Variables in Control Systems (Correction)
2 min
Intermediate
Video
Theory
This video corrects a typo in the previous lecture.
See More
Complex Fourier Series
12 min
Intermediate
Video
Theory
This video will describe how the Fourier Series can be written efficiently in complex variables.
See More![SVD: Eigenfaces 1 [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_412.jpg?itok=X4iw3jz2)
SVD: Eigenfaces 1 [Matlab]
7 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces, in the so-called "eigenfaces" (Matlab code, part 1).
See More
Sparse Identification of Nonlinear Dynamics for Model Predictive Control
12 min
Intermediate
Video
Theory
This lecture shows how to use sparse identification of nonlinear dynamics with control (SINDYc) with model predictive control to control nonlinear systems purely from data.
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 13 - Fast Rei...
79 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

RL Course by David Silver - Lecture 9: Exploration and Exploitation
99 min
Intermediate
Video
Theory
An overview of multi-armed bandits, contextual bandits and Markov Decision Processes.
See More
Derivation of Rodrigues’ Rotation Formula
43 min
Intermediate
Video
Theory
In this video we explain and derive Rodrigues’ Rotation Formula. This functions describes how to rotate an arbitrary vector about another arbitrary axis of rotation. This has applications to...
See More
Data-Driven Control: Error Bounds for Balanced Truncation
11 min
Intermediate
Video
Theory
In this lecture, we derive error bounds for the balanced truncation.
See More")
Koopman Spectral Analysis (Overview)
27 min
Intermediate
Video
Theory
In this video, we introduce Koopman operator theory for dynamical systems. The Koopman operator was introduced in 1931, but has experienced renewed interest recently because of the...
See More![SVD: Eigenfaces 3 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_417.jpg?itok=QFSaPoAT)
SVD: Eigenfaces 3 [Python]
5 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces, in the so-called "eigenfaces" (Python code, part 3).
See More
Simulating the Lorenz System in Matlab
15 min
Intermediate
Video
Application
This video shows how simple it is to simulate dynamical systems, such as the Lorenz system, in Matlab, using ode45.
See More
Controls Engineering in the FIRST Robotics Competition
Intermediate
Book
Application
This guide is intended to make an advanced engineering topic approachable so it can be applied by those who aren’t experts in control theory. The intended audience is high school students...
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 7 - Imitation...
73 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
See More