

Guaranteed Margins for LQR Regulators
10 min
Intermediate
Peer Reviewed Paper
Theory
John Doyle's famous paper! He presents a counterexample that shows that are no guaranteed margins for LQG systems.
See More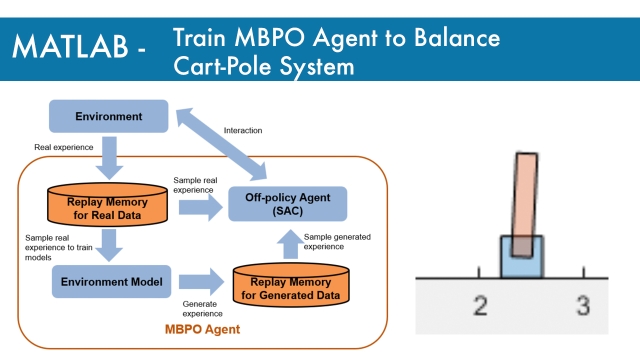
MATLAB Example: Train MBPO Agent to Balance Cart-Pole System
Intermediate
Example
Demonstration
This example shows how to train a model-based policy optimization (MBPO) agent to balance a cart-pole system modeled in MATLAB. For more information on MBPO agents, see Model-Based Policy...
See More
Perspectives on Control-Relevant Identification Through the Use of Interacti...
Intermediate
Peer Reviewed Paper
Theory
This paper presents a control-relevant identification methodology through an intuitive interactive tool called "Interactive Tool for Control Relevant Identification (ITCRI)". ITCRI...
See More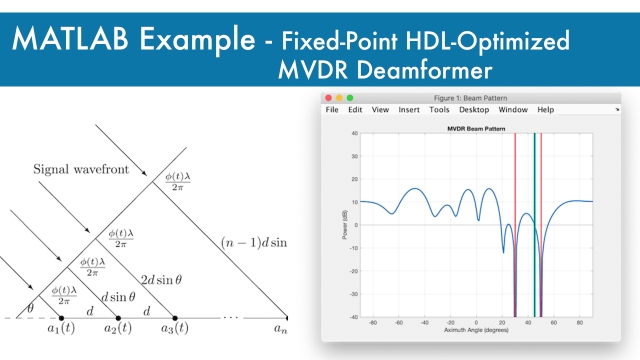
Fixed-Point HDL-Optimized Minimum-Variance Distortionless-Response (MVDR) Be...
Intermediate
Example
Application
This example shows how to implement a fixed-point HDL-optimized minimum-variance distortionless-response (MVDR) beamformer in MATLAB.
See More
Radar Systems Engineering MATLAB Documentation and Examples
Intermediate
Example
Theory
The functions in this section give you the MATLAB tools needed to evaluate the performance of a radar system. You can use the radar equation to evaluate the radar received signal-to-noise...
See More
MATLAB Example: Solve Constrained Nonlinear Optimization, Problem-Based
Intermediate
Example
Theory
This example shows how to find the minimum of a nonlinear objective function with a nonlinear constraint by using the problem-based approach.
See More
Simulating Test Signals for a Radar Receiver
Intermediate
Example
Application
This example shows how to simulate received signal of a monostatic pulse radar to estimate the target range. A monostatic radar has the transmitter collocated with the receiver. The...
See More
A Tutorial on PES Pareto Methods for Analysis of Noise Propagation in Feedba...
Intermediate
Peer Reviewed Paper
Theory
This paper represents a tutorial on the so called PES Pareto methodology of analyzing the sources of noise in a feedback loop. Originally conceived for analyzing noise contributors in...
See More
Manuscript about ITISE: an Interactive Software Tool for System Identificati...
Intermediate
Peer Reviewed Paper
Theory
The paper describes the conceptual basis, main features and functionality of an interactive software tool developed in support of system identification education and discovery.
This...
See More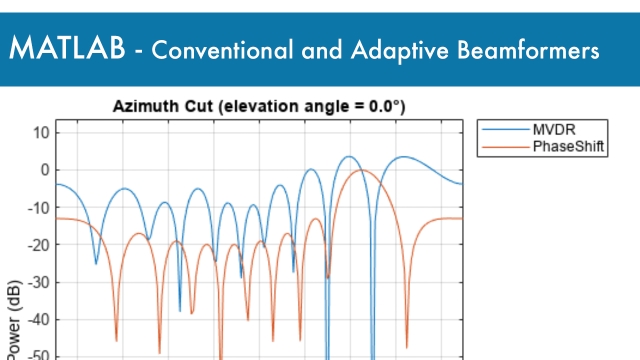
Conventional and Adaptive Beamformers
Intermediate
Example
Application
This example illustrates how to apply digital beamforming to a narrowband signal received by an antenna array. Three beamforming algorithms are illustrated: the phase shift beamformer...
See More
Creating Discrete-Time Models
Intermediate
Example
Theory
This MATLAB example shows how to create discrete-time linear models using the tf, zpk, ss, and frd commands.
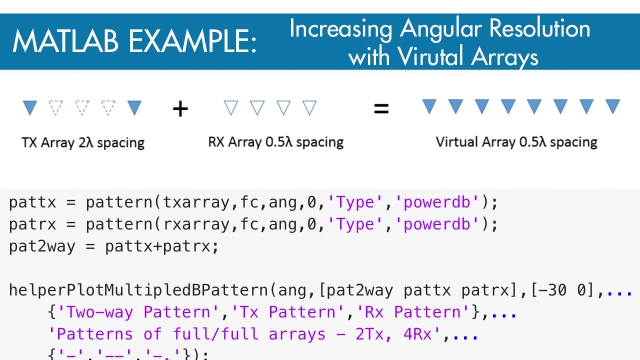
Increasing Angular Resolution with Virtual Arrays
Intermediate
Example
Application
This MATLAB example introduces how forming a virtual array in MIMO radars can help increase angular resolution. It shows how to simulate a coherent MIMO radar signal processing chain using...
See More
Dealing with Non-Stationarity in Multi-Agent Deep Reinforcement Learning
Intermediate
Peer Reviewed Paper
Theory
From the abstract
Recent developments in deep reinforcement learning are concerned with creating decision-making agents which can perform well in various complex domains. A particular...
See More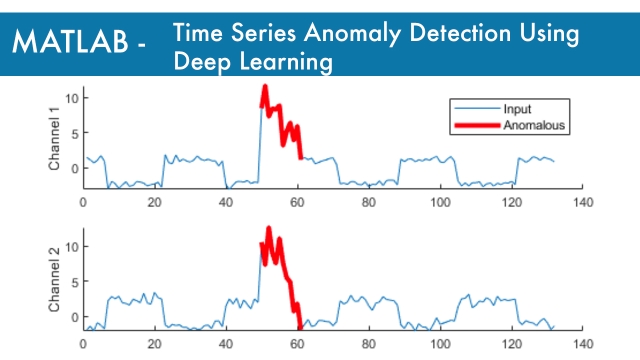
Time Series Anomaly Detection Using Deep Learning
Intermediate
Example
Demonstration
This example shows how to detect anomalies in sequence or time series data.
To detect anomalies or anomalous regions in a collection of sequences or time series data, you can use an...
See More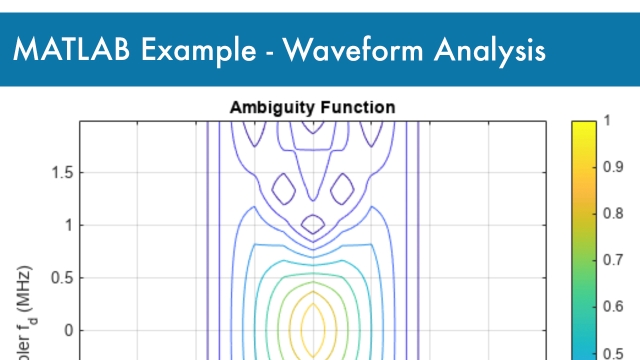
MATLAB Example: Waveform Analysis Using the Ambiguity Function
Intermediate
Example
Application
This example shows how to use the ambiguity function to analyze waveforms. It compares range and Doppler capabilities of several common pulsed waveforms such as the rectangular waveform, the...
See More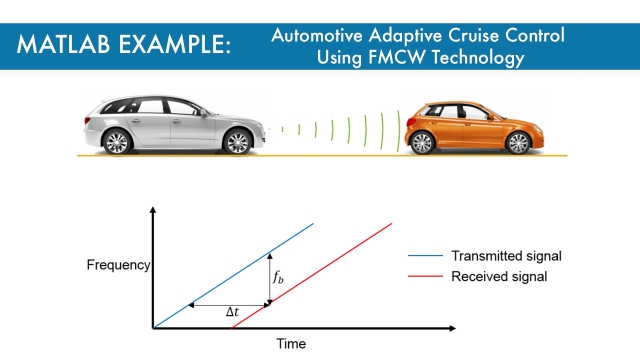
Automotive Adaptive Cruise Control Using FMCW Technology
Intermediate
Example
Application
This MATLAB example shows how to model an automotive adaptive cruise control system using the frequency modulated continuous wave (FMCW) technique. This example performs range and Doppler...
See More
Multi-agent reinforcement learning: An overview
Intermediate
Peer Reviewed Paper
Theory
From the abstract:
Multi-agent systems can be used to address problems in a variety of do- mains, including robotics, distributed control, telecommunications, and economics. The complexity...
See More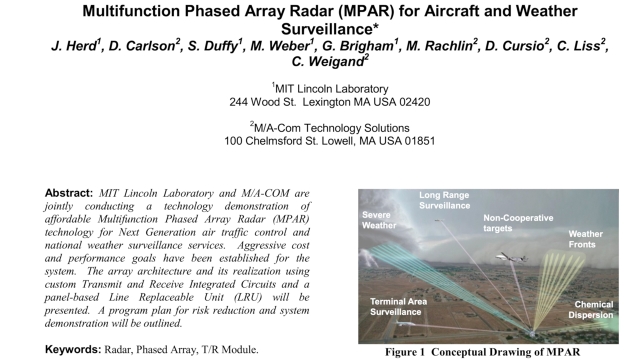
Multifunction Phased Array Radar (MPAR) for Aircraft and Weather Surveillanc...
Intermediate
Peer Reviewed Paper
Application
MIT Lincoln Laboratory and M/A-COM are jointly conducting a technology demonstration of affordable Multifunction Phased Array Radar (MPAR) technology for Next Generation air traffic control...
See More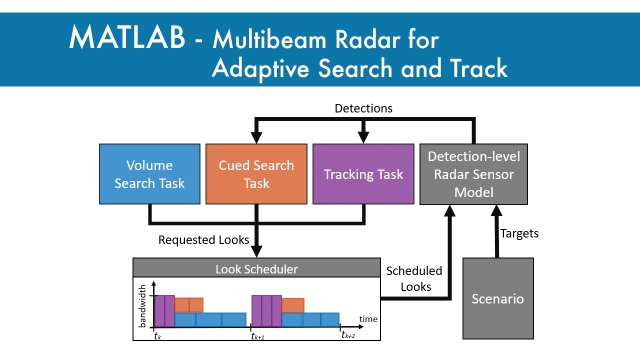
Multibeam Radar for Adaptive Search and Track
Intermediate
Example
Application
This MATLAB example shows how to use radarDataGenerator for a closed-loop simulation of a multifunction phased array radar (MPAR). The example starts by defining MPAR system parameters and...
See More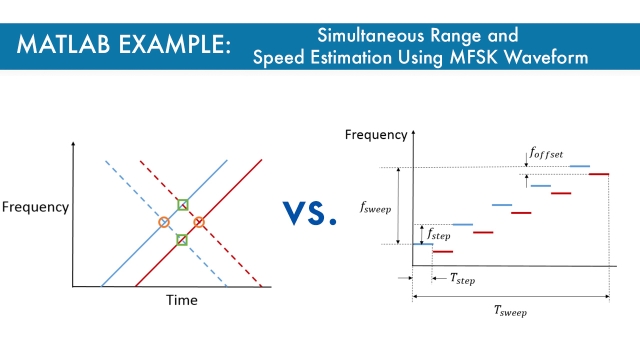
Simultaneous Range and Speed Estimation Using MFSK Waveform
Intermediate
Example
Application
This MATLAB example compares triangle sweep frequency-modulated continuous (FMCW) and multiple frequency-shift keying (MFSK) waveforms used for simultaneous range and speed estimation for...
See More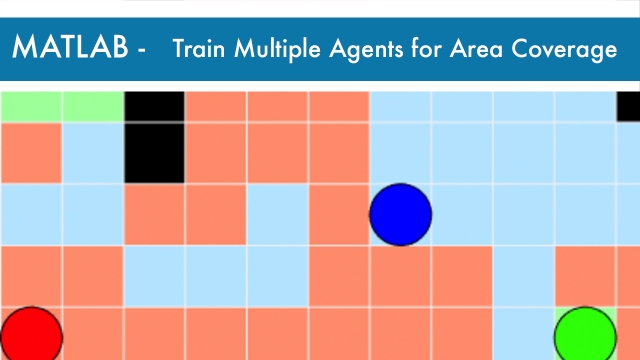
MATLAB Example: Train Multiple Agents for Area Coverage
Intermediate
Example
Application
This example demonstrates a multi-agent collaborative-competitive task in which you train three proximal policy optimization (PPO) agents to explore all areas within a grid-world environment...
See More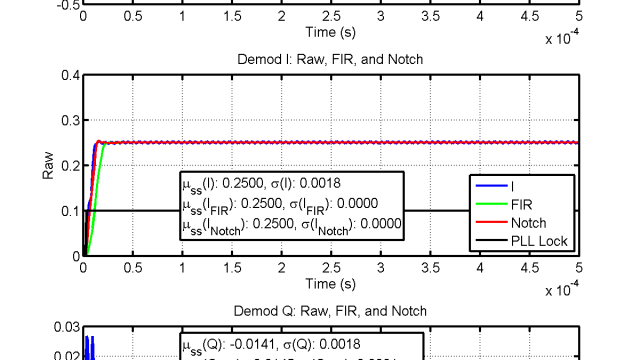
The Demod Squad: A Tutorial on the Utility and Methodologies for Using Modul...
60 min
Intermediate
Peer Reviewed Paper
Theory
This paper is a brief tutorial on methods for using modulated signals in feedback loops, and especially of the different methods and trade offs used for demodulating those signals to get...
See More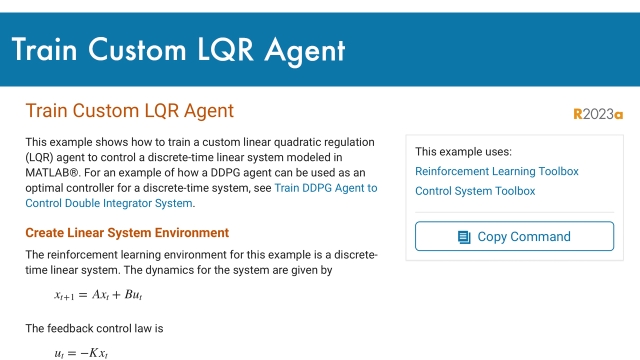
Train Custom LQR Agent with MATLAB
Intermediate
Example
Application
This example shows how to train a custom linear quadratic regulation (LQR) agent to control a discrete-time linear system modeled in MATLAB®.
See More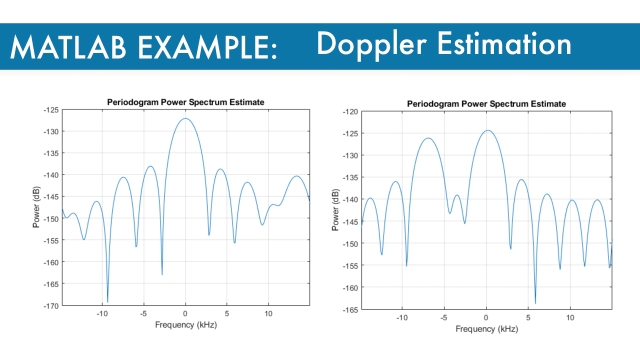
MATLAB Example: Doppler Estimation
Intermediate
Example
Application
This example shows a monostatic pulse radar detecting the radial velocity of moving targets at specific ranges. The speed is derived from the Doppler shift caused by the moving targets. We...
See More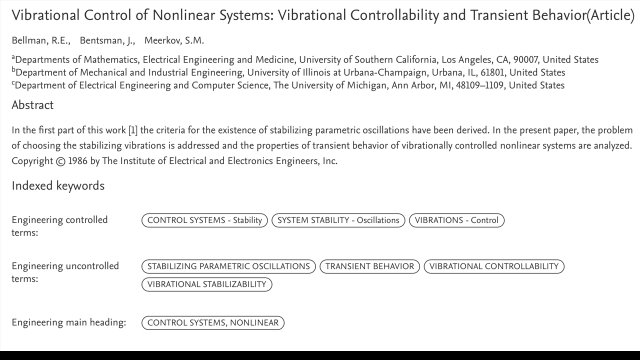
Vibrational control of nonlinear systems: Vibrational controllability and tr...
Intermediate
Peer Reviewed Paper
Theory
In the first part of this work, the criteria for the existence of stabilizing parametric oscillations have been derived. In the present paper, the problem of choosing the stabilizing...
See More