


Control Design Onramp with Simulink
60 min
Beginner
Software
Demonstration
Learn the basics of feedback control design in Simulink®. Adjust the gains of a PID controller to change the dynamics of a physical system and get the closed-loop system behavior that you...
See More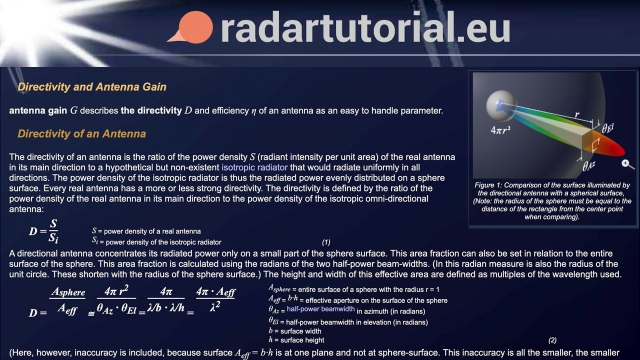
Directivity and Antenna Gain - radartutorial.eu
Beginner
Article / Blog
Theory
This page describes antenna directivity and gain. The directivity of an antenna is the ratio of the power density S (radiant intensity per unit area) of the real antenna in its main...
See More
Control Systems in Practice, Part 1: What Control Systems Engineers Do
14 min
Beginner
Video
Theory
This video walks through the phases of a typical project and describes what it means to be a control systems engineer. It covers the concept formulation phase, in which your job is to help...
See More
Interactive Course for Control Theory
Beginner
Course
Theory
Control Theory is a topic that finds a widespread application throughout engineering and natural sciences. It is very common in electrical, mechanical and process engineering. Especially...
See More
Robotic Car - A Simple Way to Build a Model
15 min
Beginner
Video
Theory
You don't always have to work out the math in order to build up a model of your system. Sometimes generating a model is as easy as running a simple test and inspecting the results. I show...
See More
What Is a Control System and Why Should I Care?
25 min
Beginner
Video
Demonstration
This is a 25 minute abbreviated version of the Part 1 & Part 2 talk. It goes through the basic ideas while skipping some of the details and examples of the longer talks. The talk abstract...
See More
Improve SNR and Capacity of Wireless Communication Using Antenna Arrays
Beginner
Example
Application
The goal of a wireless communication system is to serve as many users with the highest possible data rate given constraints such as radiation power limit and operating budget. To improve the...
See More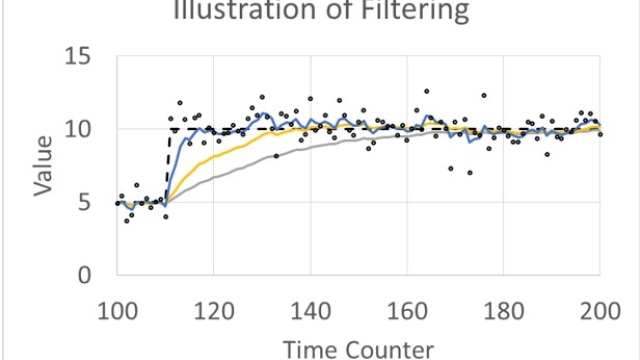
First-Order Filters
Beginner
Article / Blog
Application
Use data filters to temper noise - relation of options to lag and variance reduction
See More
Autonomous Navigation, Part 1: What is Autonomous Navigation?
11 min
Beginner
Video
Theory
Navigation is the ability to determine your location within an environment and to be able to figure out a path that will take you to a goal. This video provides an overview of how we get a...
See More
Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields...
Beginner
Book
Theory
From the reviews: "This book is concerned with the application of methods from dynamical systems and bifurcation theories to the study of nonlinear oscillations. Chapter 1 provides a review...
See More
A simple MEMS gyro model using MATLAB / Simulink
16 min
Beginner
Video
Theory
This video walks through how to model a simple MEMS gyroscope using MATLAB/Simulink. At the end I show you how to linearize this model to use in your linear control loop design and analysis.
See More
What is a Matched Filter?
10 min
Beginner
Video
Theory
This video explains the Matched Filter from a signals perspective.
See More
Introduction to Classic Control Theory (Japanese)
Beginner
Video
Theory
A collection of video lectures by Yuki Nishimura covering an introduction to classic control theory.
See More
Control Bootcamp: Introduction to Robust Control
8 min
Beginner
Video
Theory
This video motivates robust control with the famous 1978 paper by John Doyle, titled "Guaranteed Margins for LQG Regulators"... Abstract: There are none.
See More
Systems Engineering, Part 3: The Benefits of Functional Architectures
14 min
Beginner
Video
Theory
Functional, logical, and physical architectures are important tools for designing complex systems. We describe what architectures are and how they contribute to the early stages of a project...
See More
T-RECS System
Beginner
Hardware
Application
The Transportable Rotorcraft Electronic Control System (T-RECS) is a collection of components that can be built into a rotorcraft demonstrator. This hardware can be used as a test bed to...
See More
Intro to Data Science: Historical Context
8 min
Beginner
Video
Theory
This lecture provides some historical context for data science and data-intensive scientific inquiry.
See More
ENG 1718 - MODELAGEM DE SISTEMAS DINÂMICOS (Portuguese)
500 min
Beginner
Video
Theory
Vídeos do curso Modelagem de Sistemas Dinâmicos. Mais informações na página do curso: https://helonayala.github.io/teaching/2018-msd/
See More![Inverted Pendulum on a Cart [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_377.jpg?itok=1srGYhtD "Inverted Pendulum on a Cart [Control Bootcamp]")
Inverted Pendulum on a Cart [Control Bootcamp]
15 min
Beginner
Video
Theory
In this video, we introduce an example system to control: an inverted pendulum on a cart. We describe the state-space, find the fixed points, and simulate the system in Matlab. Because the...
See More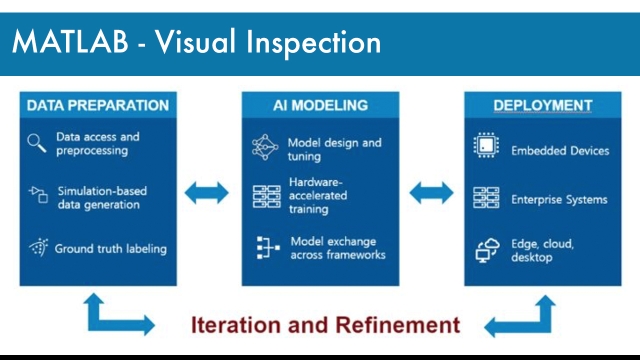
MATLAB Discovery Page - Visual Inspection
Beginner
Article / Blog
Theory
Visual inspection is the image-based inspection of parts where a camera scans the part under test for both failures and quality defects. Automated inspection and defect detection are...
See More
Robust Control, Part 3: Disk Margins for MIMO Systems
16 min
Beginner
Video
Theory
This video shows how margin can be used to assess the robustness of multi-input, multi-output systems. We’ll show how disk margin is a more complete way to represent margin for MIMO systems...
See More
The Linear Quadratic Regulator
Beginner
Article / Blog
Theory
In these notes, we will derive the solution to the finite-horizon linear quadratic regulator (LQR) problem in several different ways. Fundamentally, LQR can be viewed as a large least...
See More
So You Want to be a Systems Engineer
53 min
Beginner
Video
Theory
A presentation by Gentry Lee on what qualities and characteristics make a great systems engineer. At the time of the presentation, Gentry Lee was the Chief Engineer for the Solar System...
See More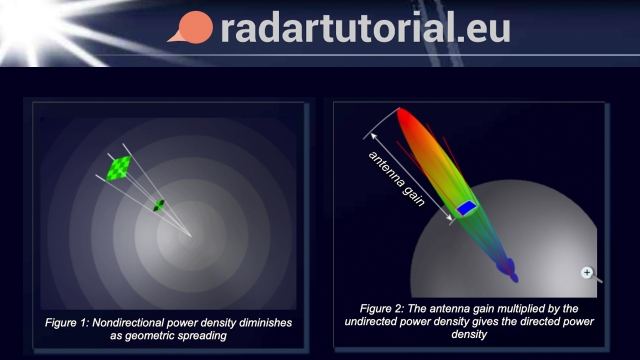
The Radar Range Equation - radartutorial.eu
Beginner
Article / Blog
Theory
This article describes the radar range equation. The radar range equation represents the physical dependences of the transmit power, which is the wave propagation up to the receiving of the...
See More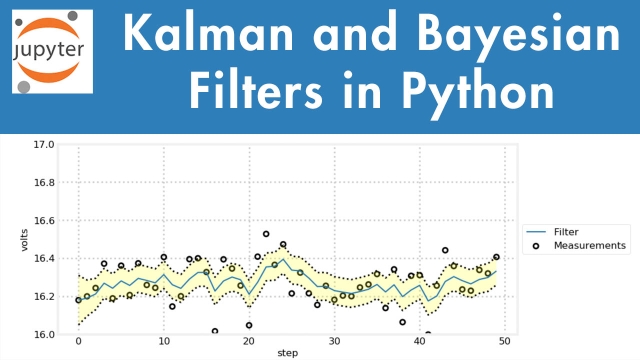
Kalman and Bayesian Filters in Python
Beginner
Software
Application
Introductory text for Kalman and Bayesian filters. All code is written in Python, and the book itself is written using Juptyer Notebook so that you can run and modify the code in your...
See More