

Intro to Data Science: Historical Context
8 min
Beginner
Video
Theory
This lecture provides some historical context for data science and data-intensive scientific inquiry.
See More")
Robotic Car - How to read Gyro Datasheets (Part 2)
14 min
Beginner
Video
Theory
Have you ever been lost trying to understand the information in a gyro datasheet? This video should help! In this second part I explain the purpose of a buffer for a MEMS gyro and explain...
See More
Autonomous Navigation, Part 5: What Is Extended Object Tracking?
17 min
Beginner
Video
Theory
In many practical scenarios, there are other objects that may need to be observed and tracked in order to effectively navigate within an environment. This video will show extended object...
See More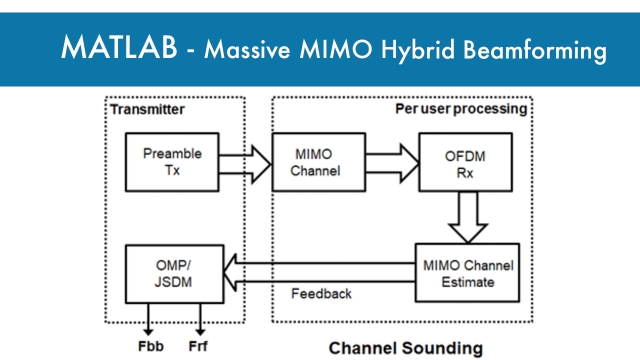
Massive MIMO Hybrid Beamforming
Beginner
Example
Application
This MATLAB example shows how hybrid beamforming is employed at the transmit end of a massive MIMO communications system, using techniques for both multi-user and single-user systems. The...
See More
MATLAB Online
Beginner
App
Application
Use MATLAB and Simulink through your web browser. No downloads or installations. MATLAB® Online™ provides access to MATLAB and Simulink from any standard web browser wherever you have...
See More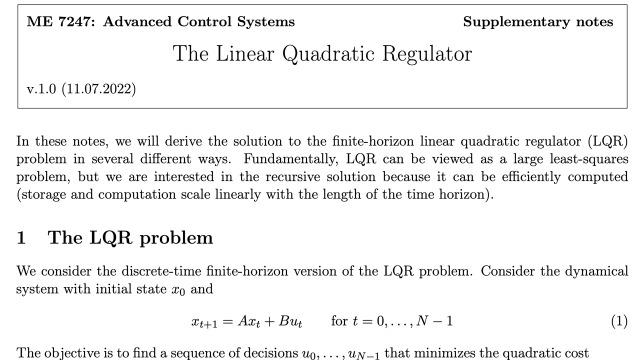
The Linear Quadratic Regulator
Beginner
Article / Blog
Theory
In these notes, we will derive the solution to the finite-horizon linear quadratic regulator (LQR) problem in several different ways. Fundamentally, LQR can be viewed as a large least...
See More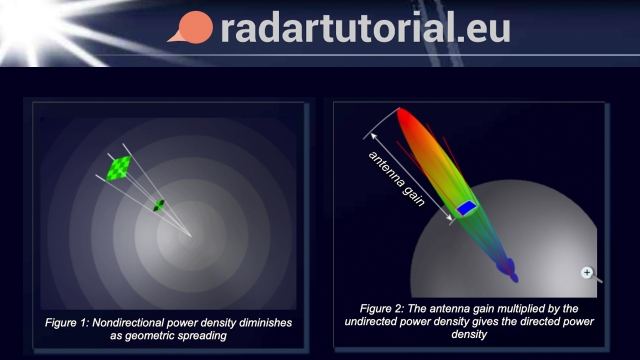
The Radar Range Equation - radartutorial.eu
Beginner
Article / Blog
Theory
This article describes the radar range equation. The radar range equation represents the physical dependences of the transmit power, which is the wave propagation up to the receiving of the...
See More
DSP Related
Beginner
Article / Blog
Application
Website with a lot of good content for any DSP scientists, researchers, and developers.
See More
Solving Systems of Equations Using the Optimization Penalty Method
44 min
Beginner
Video
Theory
In this video we show how to solve a system of equations using numerical optimization instead of analytically solving. We show that this can be applied to e...
See More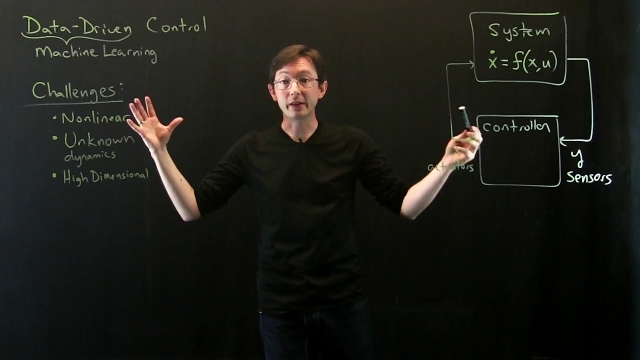
Data-Driven Control: Overview
24 min
Beginner
Video
Theory
Overview lecture for series on data-driven control. In this lecture, we discuss how machine learning optimization can be used to discover models and effective controllers directly from data...
See More
Gain a better understanding of Root Locus Plots using Matlab
19 min
Beginner
Video
Theory
In this video I go through various ways to use Matlab to plot and visualize the root locus.
See More
Understanding Sensor Fusion and Tracking, Part 6: What Is Track-Level Fusion...
15 min
Beginner
Video
Theory
Gain insights into track-level fusion, the types of tracking situations that require it, and some of the challenges associated with it.
You’ll see two different tracking architectures—track...
See More
What are Lead Lag Compensators? An Introduction.
11 min
Beginner
Video
Theory
This videos covers the very basic definition of what a lead/lag compensator is. Every control system engineer should have a basic understanding of lead/lag compensators since along with PID...
See More![The Kalman Filter [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_382.jpg?itok=BhYaUiZA "The Kalman Filter [Control Bootcamp]")
The Kalman Filter [Control Bootcamp]
6 min
Beginner
Video
Theory
Here, we discuss the Kalman Filter, which is an optimal full-state estimator, given Gaussian white noise disturbances and measurement noise.
See More
Measuring Angles with FMCW Radar | Understanding Radar Principles
16 min
Beginner
Video
Theory
Learn how multiple antennas are used to determine the azimuth and elevation of an object using Frequency Modulated Continuous Wave (FMCW) radar.
By looking at the phase shift between the...
See More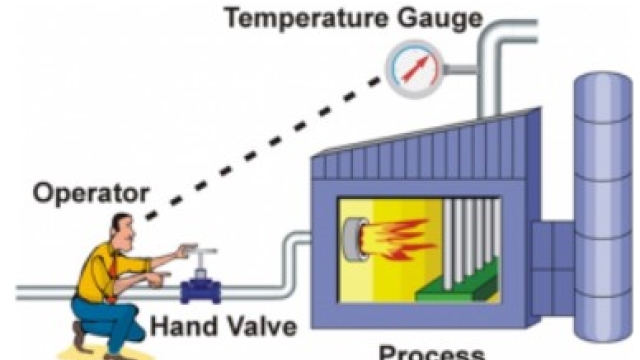
PID Explained
20 min
Beginner
Article / Blog
Theory
A qualitative explanation of P, I, & D actions using graphs.
See More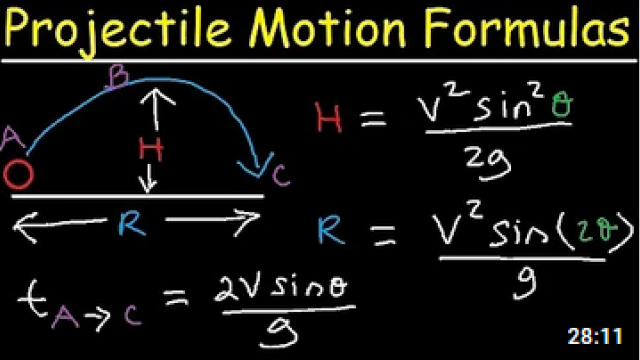
Projectile Motion Equations and Theory
28 min
Beginner
Video
Application
In this video, an important topic under 2D Kinematics i.e. Projectile Motion, is covered. Its theory, equations, and examples are thoroughly discussed.
See More
OIT System Design Laboratory (Japanese)
Beginner
Video
Demonstration
A collection of video lectures from OIT SDL.
See More
Suspending a pendulum in its inverted position using a jig saw (Take 1, norm...
1 min
Beginner
Video
Demonstration
When a pendulum is attached to a jig saw, strange things can happen! :)
See More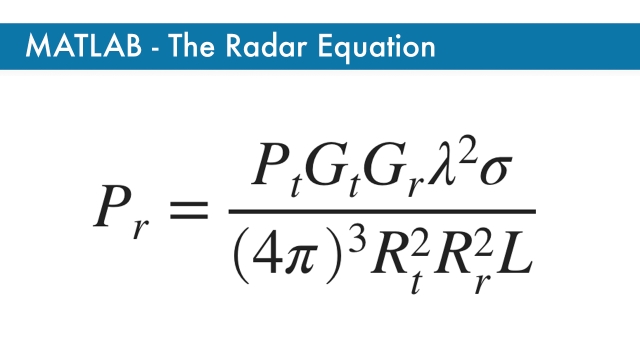
Matlab: The Radar Equation
Beginner
Article / Blog
Theory
This Mathworks page explains the parameters of the radar range equation. The point target radar range equation estimates the power at the input to the receiver for a target of a given radar...
See More
CS224n: Natural Language Processing with Deep Learning | Winter 2021
Beginner
Course
Theory
This course covers the foundations of the effective modern methods for deep learning applied to NLP, a big picture understanding of human languages and the difficulties in understanding and...
See More
DSP Lecture 1: Signals
66 min
Beginner
Video
Theory
This is a video lecture for ECSE-4530 Digital Signal Processing by Rich Radke, Rensselaer Polytechnic Institute.
See More
Model Reference Adaptive Control Part-1
60 min
Beginner
Video
Theory
Video course on nonlinear and adaptive control by Dr. Shubhendu Bhasin, Department of Electrical Engineering, IIT Delhi.
See More
Intro to Data Science: Answering Questions with Data
6 min
Beginner
Video
Theory
This lecture describes the central aspect of data science: asking and answering questions with data. In particular, we discuss the thought process and progression of questions one might ask...
See More")
Robotic Car - How to read Gyro Datasheets (Part 1)
14 min
Beginner
Video
Theory
Have you ever been lost trying to understand the information in a gyro datasheet? This video should help! In this first part I go through the mechanical characteristics of a MEMS gyro and...
See More