


Types of Machine Learning 1
6 min
Beginner
Video
Theory
This lecture gives an overview of the main categories of machine learning, including supervised, un-supervised, and semi-supervised techniques, depending on the availability of expert labels...
See More
IMC Design of an Unstable Process Example
10 min
Beginner
Video
Theory
In this video, I cover how we can use IMC method to rigorously design a controller for an inherently unstable process (has a positive pole).
See More
Control systems with non-minimum phase dynamics
8 min
Beginner
Video
Theory
This video describes control systems that have non-minimum phase dynamics, characterized by a zero of the input--output transfer function in the right-half-plane. Physically, these systems...
See More
Relative Gain Array RGA and Input Output Pairing
12 min
Beginner
Video
Theory
The RGA is a tool used by process engineers to determine how to pair inputs and outputs during controller design to strive for better performance and robustn...
See More
Drone Control and the Complementary Filter
11 min
Beginner
Video
Theory
Let's talk about the complementary filter and how we can use it to estimate the attitude of a drone using an IMU. It is such a dead simple filter, which is a good reason to learn it, but it...
See More
Homogeneous Linear Ordinary Differential Equations
74 min
Beginner
Video
Theory
In this video we discuss how to solve homogeneous linear ordinary differential equations (ODEs). The approach outlined in this lecture is applicable to high...
See More
Peter Ponders PID - IAE,ITAE,ISE Performance indicators
17 min
Beginner
Video
Theory
Performance indicators can be used to compute closed loop pole locations. Only one gain parameter is required to move the pole locations closer to the origi...
See More
Robotic Car, Closed Loop Control Example
13 min
Beginner
Video
Application
I demonstrate the value of closed loop control in an uncertain environment using my Zumo Robot car. If you're interested in building one yourself and trying this out I think I've given you...
See More
Cartesian, Polar, Cylindrical, and Spherical Coordinates
54 min
Beginner
Video
Theory
In this video we discuss Cartesian, Polar, Cylindrical, and Spherical coordinates as well as develop forward and reverse transformations to go from one coord...
See More
Auto Tuning a Small DC Motor in Torque Mode
1 min
Beginner
Video
Theory
I was really testing the picture in picture feature of the Screen Flow software I use to make these videos. I knew the auto tuning would work. I kept the v...
See More
Extremum Seeking Control in Simulink
26 min
Beginner
Video
Application
This lecture explores extremum-seeking control (ESC) on a simple example in Matlab’s Simulink.
See More
Understanding Sensor Fusion and Tracking, Part 1: What Is Sensor Fusion?
12 min
Beginner
Video
Theory
This video provides an overview of what sensor fusion is and how it helps in the design of autonomous systems. It also covers a few scenarios that illustrate the various ways that sensor...
See More
Understanding and Sketching the Root Locus
176 min
Beginner
Video
Theory
In this video we discuss how to sketch the root locus for a system by developing a series of 5 core rules augmented by 5 supplemental rules (for a total of 1...
See More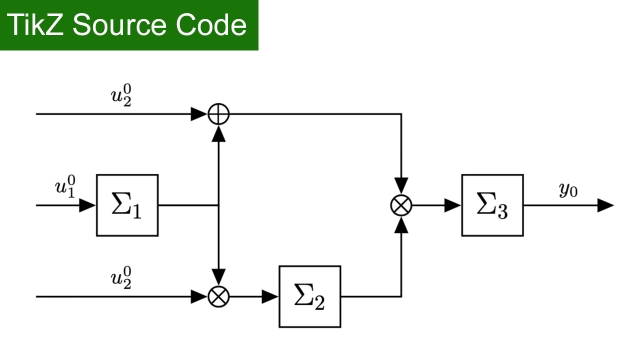
TikZ source Code: Multiplication of system variables
Beginner
Source Code
Application
TikZ source Code: Multiplication of system variables
See More
Basic Control Lectures
Beginner
Presentation
Theory
Systems approach, understanding and describing the operation of systems and methods of controlling them are among the basic knowledge of engineering education. But understanding the main...
See More
Standard HW Problem #2: Which is the real open loop transfer function?
13 min
Beginner
Video
Theory
In this video, we’ll go through another standard homework problem so you can see how you can apply many of the things you’re learning into a single problem. The question is, we have two...
See More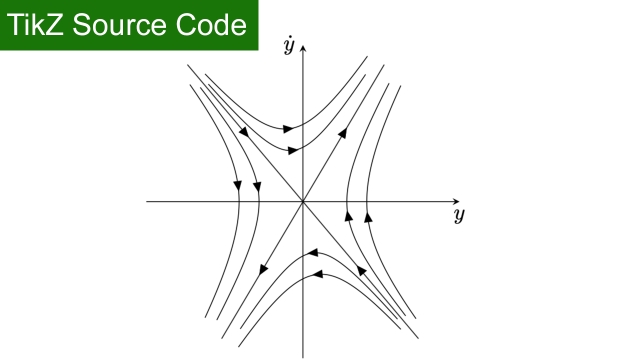
TikZ source Code: Sliding Mode Control Example System 1
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example System 1
See More
Lecture 14: Routh Hurwitz Criterion
22 min
Beginner
Video
Theory

Derivation of the 2D Wave Equation
27 min
Beginner
Video
Theory
In this video we derive the 2D wave equation. This partial differential equation governs the motion of waves in a plane and is applicable for thin vibrating...
See More
Lecture 4: Electromechanical system Transfer functions and Analogous circuit...
31 min
Beginner
Video
Theory

Frequency domain – tutorial 6: Fourier transform tables
34 min
Beginner
Video
Theory
In this video, we learn about Fourier transform tables which enable us to quickly travel from time to the frequency domain. The main learning objective is to...
See More
Lecture 21: Introduction to Frequency Response
57 min
Beginner
Video
Theory