


Lecture 23: Bode plots
48 min
Beginner
Video
Theory

Laplace domain – tutorial 1: Laplace transform
15 min
Beginner
Video
Theory
In this video, we learn about Laplace transform which enables us to travel from time to the Laplace domain. The following materials are covered:1) why we nee...
See More
Frequency domain – tutorial 9: frequency response
23 min
Beginner
Video
Theory
In this video, the learning objectives are to:1- fully understand the frequency response which forms the foundation of filtering 2- quickly review the common...
See More![Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_431.jpg?itok=vs89WnA2 "Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart [Control Bootcamp]")
Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart...
13 min
Beginner
Video
Theory
Here we design an optimal full-state feedback controller for the inverted pendulum on a cart example using the linear quadratic regulator (LQR). In Matlab, we find that this is a simple one...
See More![Controllability and the PBH Test [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_303.jpg?itok=Q45x3uZ4)
Controllability and the PBH Test [Control Bootcamp]
13 min
Beginner
Video
Theory
This video describes the PBH test for controllability and describes some of the implications for good choices of "B".
See More
Project Based Engineering Instrumentation with CircuitPython
Beginner
Book
Application
This textbook has been designed with the student and faculty member in mind. First, this textbook goes hand in hand with Engineering Instrumentation taught at the undergraduate level at many...
See More
Peter Ponders PID - Cascade Control Part1
20 min
Beginner
Video
Theory
I cover whether cascade control is necessary. Why there needs to be a feed back for every loop. How to calculate gains. Bode plots and ratio of the inner t...
See More
Machine Learning Control: Genetic Programming Control
10 min
Beginner
Video
Theory
This lecture discusses the use of genetic programming to manipulate turbulent fluid dynamics in experimental flow control.
See More
Inputs and Outputs as defined by a Process Control Engineer
7 min
Beginner
Video
Theory
Defining process inputs and outputs is a lot more complicated than I initially thought when I was learning about process control. In this video, I share how ...
See More
Understanding Model Predictive Control, Part 6: How to Design an MPC Control...
9 min
Beginner
Video
Theory
Learn how to design an MPC controller for an autonomous vehicle steering system using Model Predictive Control Toolbox™. This video walks you through the design process of an MPC controller...
See More
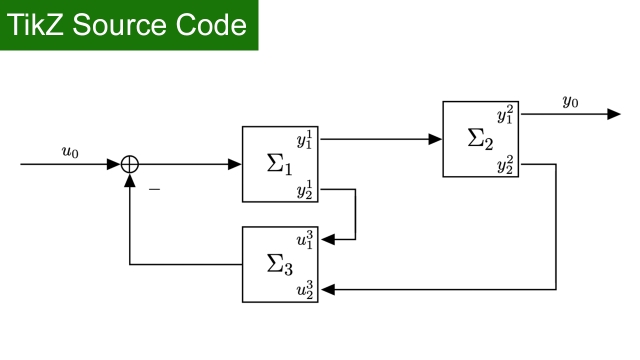
TikZ source Code: Interconnected MIMO Subsystems
Beginner
Source Code
Application
TikZ source Code: Interconnected MIMO Subsystems with different input and output dimensions
See More
PID Control - A brief introduction
7 min
Beginner
Video
Theory
In this video, I introduce the topic of PID control. This is a short introduction design to prepare you for the next few lectures where I will go through several examples of PID control....
See More")
The Discrete Fourier Transform (DFT)
17 min
Beginner
Video
Application
This video introduces the Discrete Fourier Transform (DFT), which is how to numerically compute the Fourier Transform on a computer. The DFT, along with its fast FFT implementation, is one...
See More
Transfer Function to State Space
56 min
Beginner
Video
Theory
In this video we show how to transform a transfer function to an equivalent state space representation. We will derive various transformations such as contr...
See More
Making an INSANE Hovering RC F-35 VTOL
21 min
Beginner
Video
Application
I built this insane radio controlled VTOL F-35 parkjet that can takeoff and land vertically using conventional miniquad/drone parts. The best part is the plans and code are all free, and I’m...
See More
Manipulating Aerodynamic Coefficients
25 min
Beginner
Video
Theory
In this video we discuss some potential problems you may encounter when attempting to perform operations with dimensionless aerodynamic coefficients such as ...
See More
Routh-Hurwitz Criterion, An Introduction
12 min
Beginner
Video
Theory
This video gives an introduction into the Routh-Hurwitz Criterion and the Routh Array. I also present a little background information in order to emphasize why the method was developed and...
See More
TUTORIAL on Stability and Routh Hurwitz criterion
29 min
Beginner
Video
Theory

Designing a PID Controller Using the Root Locus Method
63 min
Beginner
Video
Theory
In this video we discuss how to use the root locus method to design a PID controller. In addition to discussing the theory, we look at Matlab tools to enabl...
See More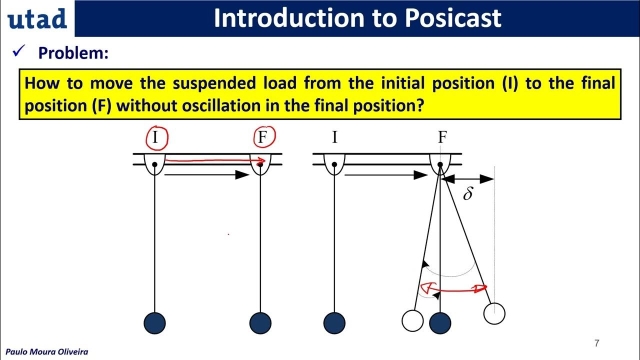
Posicast Control - 1 ( In English)
11 min
Beginner
Video
Theory
This video is an introduction to a learning journey about Posicast Control structured as follows: - Preface - Motivation - Introduction to Posicast Control - Half-Cycle Posicast
See More
Deriving Percent Overshoot, Settling Time, and Other Performance Metrics
59 min
Beginner
Video
Theory
In this video we examine a second order dynamic system and derive how various performance metrics (such as time to first peak, magnitude at first peak, perce...
See More
Lecture 8: More on Transfer Functions
23 min
Beginner
Video
Theory

Frequency domain – tutorial 8: frequency spectra
9 min
Beginner
Video
Theory
In this video, we learn about frequency spectra which can be divided into two parts: phase and magnitude spectrum. Some examples will be provided to practice...
See More
Stanford CS229: Machine Learning | Autumn 2018
Beginner
Video
Theory
Autumn 2018 Stanford course on machine learning by Andrew Ng.
See More