

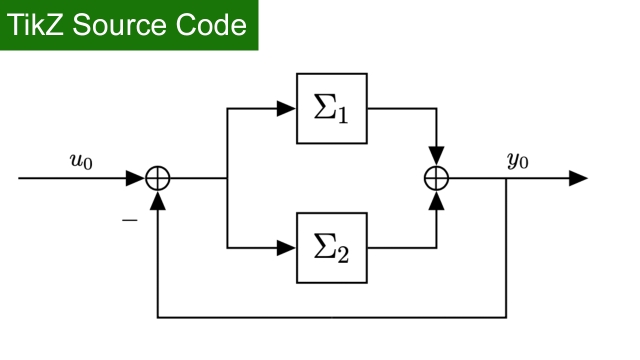
TikZ source Code: Feedback systems
Beginner
Source Code
Application
TikZ source Code: Feedback systems
See More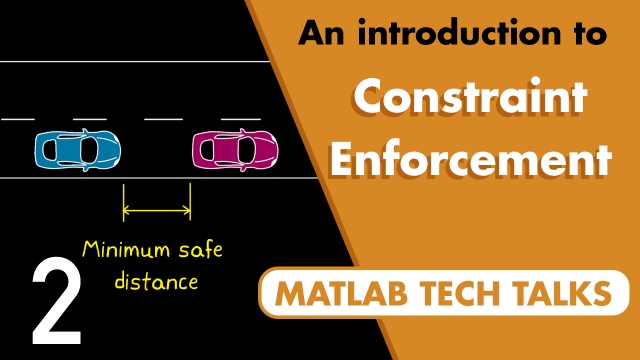
Constraint Enforcement for Improved Safety | Learning-Based Control
14 min
Beginner
Video
Theory
Learn about the constraints of your system. Then see a how to enforce those constraints so the system does not violate them. Constraint enforcement is important for safety-critical...
See More
Fourier Series: Part 1
12 min
Beginner
Video
Theory
This video will show how to approximate a function with a Fourier series, which is an infinite sum of sines and cosines. We will discuss how these sines and cosines form a basis for the...
See More
Control Systems in Practice, Part 6: What Are Non-Minimum Phase Systems?
14 min
Beginner
Video
Theory
We like to categorize transfer functions into groups and label them because it helps us understand how a particular system will behave simply by knowing the group that it’s part of. We gain...
See More
Routh Array and Stability
7 min
Beginner
Video
Theory
I show how we can find the range of allowed controller gains for a system that will allow us to maintain stability using a Routh Array.
See More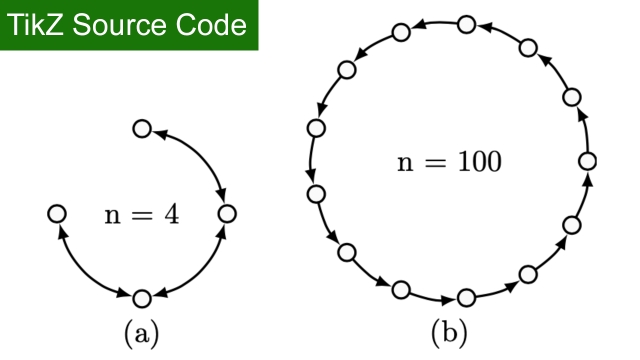
TikZ source Code: Simulation Graph
Beginner
Source Code
Application
TikZ source Code: Simulation Graph
See More
Nonhomogeneous Linear Ordinary Differential Equations
70 min
Beginner
Video
Theory
In the previous video (https://youtu.be/3Kox-3APznI) we examined solving homogeneous linear ordinary differential equations (the forcing function was equal t...
See More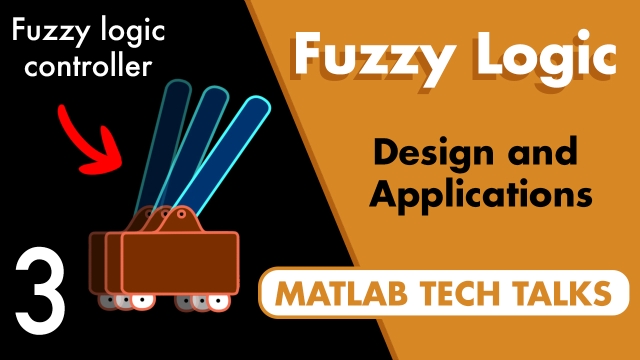
Fuzzy Logic, Part 3: Design and Applications of a Fuzzy Logic Controller
17 min
Beginner
Video
Theory
This video walks you through the process of designing a fuzzy inference system that can balance a pole on a cart. You can design a fuzzy logic controller using just experience and intuition...
See More
Lecture 16: More on Root Locus and Gain Compensation
43 min
Beginner
Video
Theory

Numerically Solving Partial Differential Equations
101 min
Beginner
Video
Theory
In this video we show how to numerically solve partial differential equations by numerically approximating partial derivatives using the finite difference me...
See More
Understanding The Sensitivity Function
13 min
Beginner
Video
Theory
In this video I explain the sensitivity function and try to demystify the equation used to solve for the nominal sensitivity peak. Sensitivity describes how much process variations affect...
See More
Tuning a Fuzzy Logic Controller with Data | Fuzzy Logic, Part 4
18 min
Beginner
Video
Theory
This video covers the basics of data-driven approaches to tuning fuzzy inference systems. See what it means to find an optimal solution, which fuzzy inference parameters are being tuned...
See More
Using ‘rlocus’ in Matlab to Plot the Root Locus
19 min
Beginner
Video
Application
This tutorial illustrates how to use the ‘rlocus’ command in Matlab to quickly and easily sketch the root locus.Discussion on the 3 example transfer function...
See More
Control Systems Lectures - Transfer Functions
11 min
Beginner
Video
Theory
This lecture describes transfer functions and how they are used to simplify modeling of dynamic systems.
See More
Lectures on Adaptive Control and Learning by Tansel Yucelen
Beginner
Video
Theory
A serie of lectures on the topic of adaptive controllers.
See More
Lecture 25: Nyquist stability criterion
48 min
Beginner
Video
Theory

Derivation of the Heat Equation
31 min
Beginner
Video
Theory
In this video, we derive the heat equation. This partial differential equation (PDE) applies to scenarios such as the transfer of heat in a uniform, homogen...
See More
CORRECTION: Bode Plots by Hand: Complex Poles or Zeros
10 min
Beginner
Video
Theory
I explain how to determine the straight-line estimate of the Bode Plot for a second order transfer function with a pair of complex poles. This video is a repeat of the last half of the Bode...
See More![Randomized SVD Code [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_402.jpg?itok=pmR7mX3g)
Randomized SVD Code [Python]
10 min
Beginner
Video
Application
This video describes the randomized singular value decomposition (rSVD) (Python code).
See More
Euler (Gimbal Lock) Explained
8 min
Beginner
Video
Theory
In this video we explore Euler Rotations, the most common method for orienting objects in 3d. It's by-product "gimbal lock" can cause headaches for animators because the animated motion can...
See More
Peter Ponders PID - LQR Optimizing Two Outputs
16 min
Beginner
Video
Theory

Frequency domain – tutorial 2: Fourier series
25 min
Beginner
Video
Theory
In this video, we learn Fourier series which enables us to travel from time to the frequency domain when a signal is periodic. The following materials are co...
See More
Control Bootcamp: Loop shaping
7 min
Beginner
Video
Theory
This video explores shaping the loop transfer function to have desirable sensitivity and complementary sensitivity.
See More
Process Control Introduction
14 min
Beginner
Video
Theory
An overview on state variables, inputs (manipulated and disturbance variables), outputs (measured state variables), and an example on the balance equations w...
See More with Smith Predictor")
SOPDT Sliding Mode Control ( SMC ) with Smith Predictor
6 min
Beginner
Video
Theory