

![Fourier Series [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_361.jpg?itok=HDuxGf-8 "Fourier Series [Matlab]")
Fourier Series [Matlab]
8 min
Beginner
Video
Application
This video will describe how to compute the Fourier Series in Matlab.
See More
Time domain - tutorial 7: system properties
22 min
Beginner
Video
Theory
In this video, we cover system properties. The concept of memoryless, causal, stable, invertible, time-invariant and linear systems is intuitively explained...
See More")
Control Bootcamp: Linear Quadratic Gaussian (LQG)
8 min
Beginner
Video
Theory
This lecture combines the optimal full-state feedback (e.g., LQR) with the optimal full-state estimator (e.g., LQE or Kalman Filter) to obtain the sensor-based linear quadratic Gaussian (LQG...
See More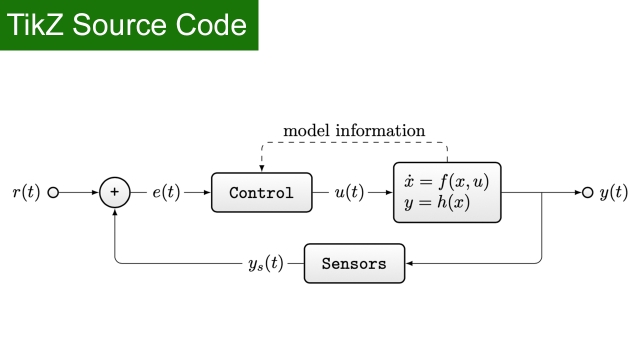
TikZ source Code: Feedback system
Beginner
Source Code
Application
TikZ source Code: Feedback system
See More
Time domain - tutorial 10: interconnection of LTI systems
7 min
Beginner
Video
Theory
In this video, we learn how to connect LTI systems to make a bigger system. The learning objectives are to:1) get familiar with parallel and series intercon...
See More
Machine Learning Control: Genetic Algorithms
13 min
Beginner
Video
Theory
This lecture provides an overview of genetic algorithms, which can be used to tune the parameters of a control law.
See More
What Is a Control System and Why Should I Care? (Part 2)
34 min
Beginner
Video
Theory
This talk gives a glimpse of some of the methods and math that allow us to understand feedback systems. Continuing on from Part 1, it gives a description of how we use scientific principles...
See More
Second Order Dynamics in Process Control
17 min
Beginner
Video
Theory
How do we simulate two first order transfer functions in series, a inherently second order system, or two coupled differential equations? Tune in to find out!
See More
Lecture 28: Lag Compensator Design using Bode Plots
51 min
Beginner
Video
Theory

Understanding Model Predictive Control, Part 4: Adaptive, Gain-Scheduled and...
6 min
Beginner
Video
Theory
This video explains the type of MPC controller you can use based on your plant model, constraints, and cost function. An optimization problem with these properties is a convex one, and you...
See More
Visually Determining Transfer Functions
6 min
Beginner
Video
Theory
Process Control classes can get pretty hard to follow when you lose sight of what transfer functions really are. How do you get them in the first place?
See More
Lecture 10: Second Order Underdamped Systems: Unit step response and time do...
23 min
Beginner
Video
Theory
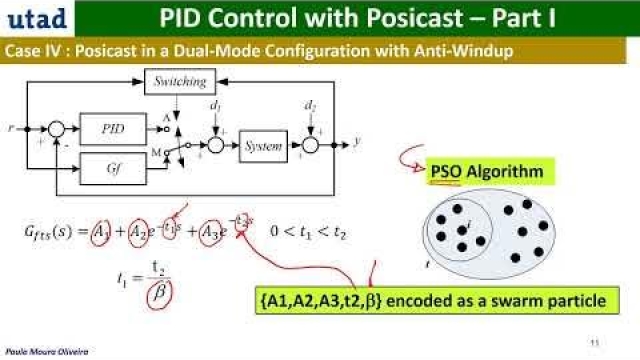
PID Control with Posicast 7 - ( In English )
12 min
Beginner
Video
Theory
In this video closed-loop configurations with PID controllers and Posicast are introduced.
See More
Deploying Deep Learning Models | Deep Learning for Engineers, Part 5
15 min
Beginner
Video
Theory
This video covers the additional work and considerations you need to think about once you have a deep neural network that can classify your data. We need to consider that the trained network...
See More
Fuzzy Inference System Walkthrough | Fuzzy Logic Part 2
16 min
Beginner
Video
Theory
This video walks step-by-step through a fuzzy inference system. Learn about concepts like membership function shapes, fuzzy operators, multiple-input inference systems, and rule firing...
See More")
Building a Matlab/Simulink Model of an Aircraft: the Research Civil Aircraft...
51 min
Beginner
Video
Application
In this video we implement the RCAM model as a Matlab script that is called from a Simulink model. The result is a fully encapsulated Simulink model of a no...
See More
Setting Up Your Radio Connection - dRehmFlight VTOL
4 min
Beginner
Video
Application
This video will show you how to set up your radio to work with dRehmFlight VTOL. The code supports PWM, PPM, and SBUS type receivers, allowing you to connect and use 6 channels within the...
See More
Machine Learning - Andrew Ng, Stanford University
Beginner
Video
Theory
Machine learning is the science of getting computers to act without being explicitly programmed. In the past decade, machine learning has given us self-driving cars, practical speech...
See More
Sketching Root Locus Part 2
16 min
Beginner
Video
Theory
This is the second part of how to sketch a root locus by hand. However instead of following the normal rules for sketching a locus that you'd see in a book, I decided to explain the rules...
See More
Bode Plots by Hand: Real Constants
8 min
Beginner
Video
Theory
This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a simple transfer function; a real constant.
See More
Introduction to Full State Feedback Control
62 min
Beginner
Video
Theory
In this video we introduce the concept of a full state feedback controller. We discuss how to use this system to place the eigenvalues of the closed loop sys...
See More
Peter Ponders PID - IAE,ITAE,ISE Performance indicators
17 min
Beginner
Video
Theory
Performance indicators can be used to compute closed loop pole locations. Only one gain parameter is required to move the pole locations closer to the origi...
See More
Lecture 1 Introduction to Automatic Control
29 min
Beginner
Video
Theory
Auto Tuning a Small DC Motor in Torque Mode
1 min
Beginner
Video
Theory
I was really testing the picture in picture feature of the Screen Flow software I use to make these videos. I knew the auto tuning would work. I kept the v...
See More
Extremum Seeking Control in Simulink
26 min
Beginner
Video
Application
This lecture explores extremum-seeking control (ESC) on a simple example in Matlab’s Simulink.
See More