

The Kalman Filter
25 min
Beginner
Article / Blog
Theory
This article introduces the Kalman filter at a high level and tries to provide some insight into how the filter is able to estimate state by combining measurements and models.
This is an...
See More
How a Kalman Filter Works in Pictures
20 min
Beginner
Article / Blog
Theory
This article builds up some intuition about the Kalman filter using pictures before diving into the mathematics. A beginner will come away with an understanding of what the Kalman filter is...
See More
An Introduction to the Kalman Filter
45 min
Beginner
Article / Blog
Theory
The purpose of this paper is to provide a practical introduction to the discrete Kalman filter. This introduction includes a description and some discussion of the basic discrete Kalman...
See More
Radar Tutorial (English)
Beginner
Article / Blog
Theory
This page provides a detailed overview of radar principles and technologies, including mathematical, physical and technical explanations. “Radartutorial” explains the fundamentals of radar...
See More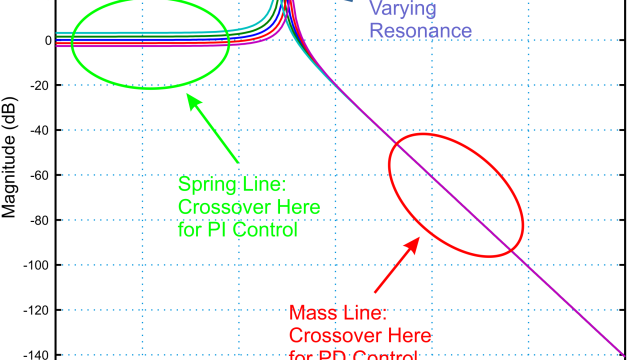
What's a Control System and Why Should I Care? A whirlwind tour through the ...
60 min
Beginner
Article / Blog
Theory
This paper aims to provide some introduction, a cheat sheet, and some context for college level STEM students about to take that first controls class. In some cases, it provides context...
See More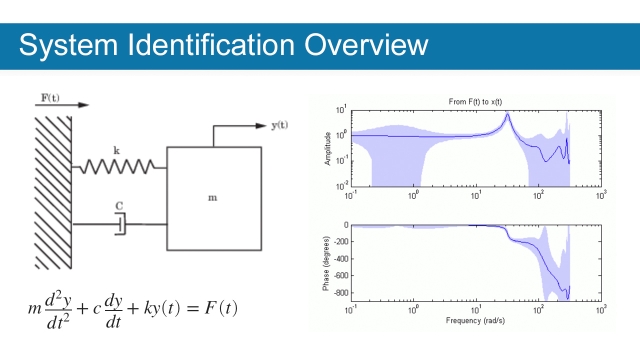
System Identification Overview
Beginner
Article / Blog
Theory
System identification is a methodology for building mathematical models of dynamic systems using measurements of the input and output signals of the system. This overview from Mathworks...
See More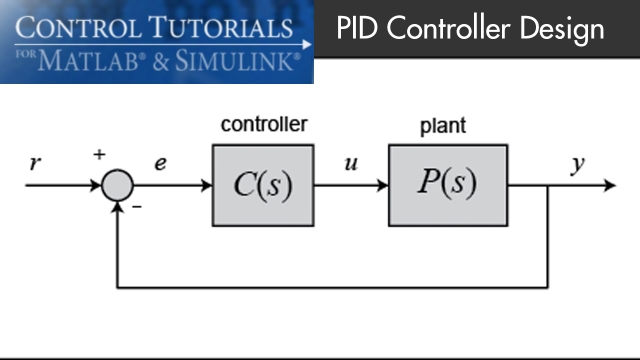
Introduction: PID Controller Design
30 min
Beginner
Article / Blog
Application
In this tutorial we will introduce a simple, yet versatile, feedback compensator structure: the Proportional-Integral-Derivative (PID) controller. The PID controller is widely employed...
See More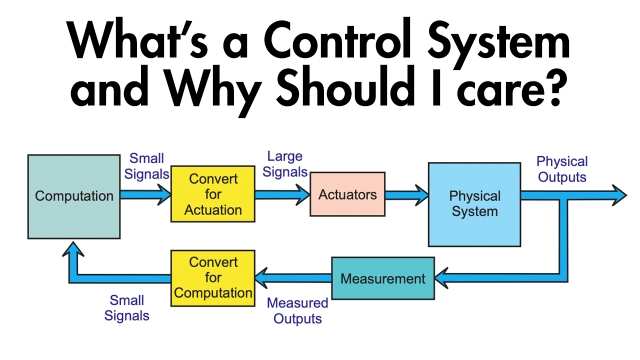
What's a Control System and Why Should I Care?
Beginner
Article / Blog
Theory
This paper is designed as a primer for college level STEM students about to take their first formal class in feedback control systems. This means that the explanations assume the reader has...
See More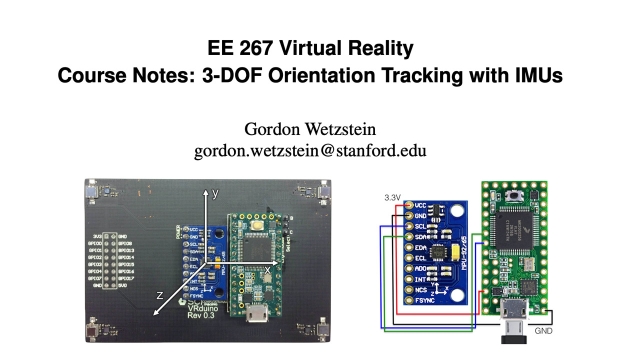
3-DOF Orientation Tracking with IMUs
30 min
Beginner
Article / Blog
Theory
This document is not meant to be a comprehensive review of orientation tracking for virtual reality applications but rather an intuitive introduction to inertial measurement units (IMUs) and...
See More
How Simulations Work
30 min
Beginner
Article / Blog
Theory
This article sets out the critical aspects of building good simulations — that is, simulations that are accurate, easy to develop and analyze, and fast. The first sections deal with how a...
See More
How Kalman Filters Work, Part 1
30 min
Beginner
Article / Blog
Theory
This article looks at four popular estimation filter architectures: particle filter, sigma point filter, extended Kalman filter, and the Kalman filter. It discusses how all four of these...
See More
Improving the Beginner's PID - Introduction
30 min
Beginner
Article / Blog
Application
In conjunction with the release of the new Arduino PID Library Brett has released this series of posts that explain his PID code. He start's with what he call's “The Beginner’s PID.” He...
See More
Pathfinding with A*
60 min
Beginner
Article / Blog
Application
An interactive visual explanation of the A* pathfinding algorithm. This resource uses motivating examples from computer games.
See More
A Hybrid Lab Experience: Blending Hands-on Explorations with the Flexibility...
30 min
Beginner
Article / Blog
Demonstration
This case study examines how the Earth and Space Science and Engineering (ESSE) department at York University in Toronto offered a meaningful remote laboratory experience to over 180...
See More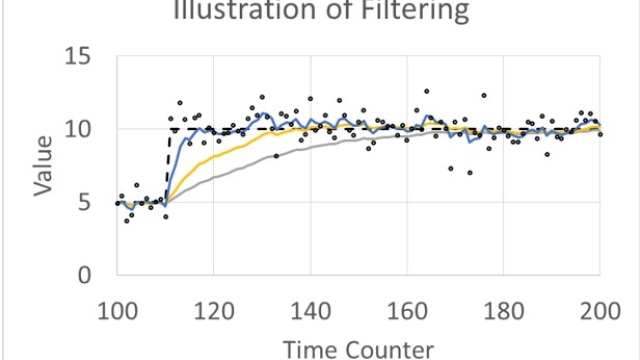
First-Order Filters
Beginner
Article / Blog
Application
Use data filters to temper noise - relation of options to lag and variance reduction
See More
Post-Pandemic: A Hybrid Lab Experience
Beginner
Article / Blog
Application
This article discusses the importance of a hybrid laboratory model, blending physical hardware with digital twins. Example using the Quanser Interactive Lab (QLabs) platform is given.
See More
My Sole Advise to Data Scientists on Coursera & Quora
Beginner
Article / Blog
Theory
This blog post by Tarry Singh answers questions including "How do I get started in the field on Machine Learning, Deep Learning or Artificial Intelligence" and "How do I advance from the...
See More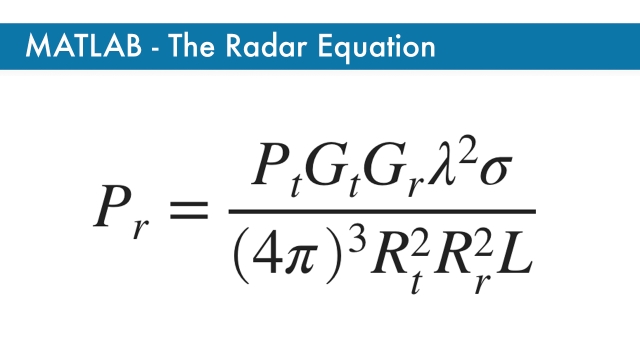
Matlab: The Radar Equation
Beginner
Article / Blog
Theory
This Mathworks page explains the parameters of the radar range equation. The point target radar range equation estimates the power at the input to the receiver for a target of a given radar...
See More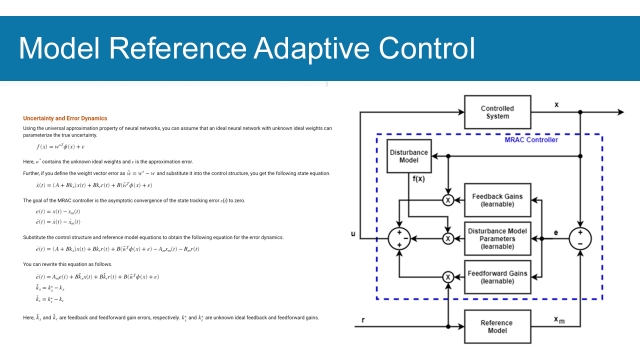
Mathworks Model Reference Adaptive Control Overview
Beginner
Article / Blog
Theory
This website provides an overview of the mathematics behind Model Reference Adaptive Control (MRAC). MRAC is a model-based, real-time adaptive control algorithm that computes control actions...
See More
PID Explained
20 min
Beginner
Article / Blog
Theory
A qualitative explanation of P, I, & D actions using graphs.
See More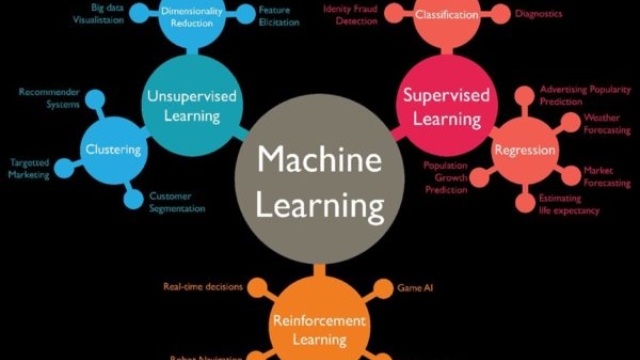
An Artificial Intelligence Primer
15 min
Beginner
Article / Blog
Theory
This blog post is a great primer providing definitions for basic terms used in AI and machine learning (ML) such as supervised learning, unsupervised learning, and transfer learning...
See More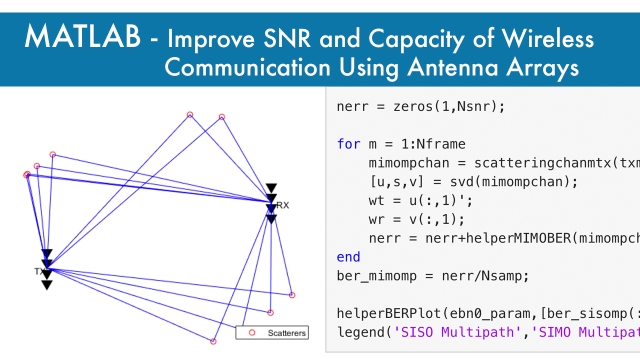
Improve SNR and Capacity of Wireless Communication Using Antenna Arrays
Beginner
Example
Application
The goal of a wireless communication system is to serve as many users with the highest possible data rate given constraints such as radiation power limit and operating budget. To improve the...
See More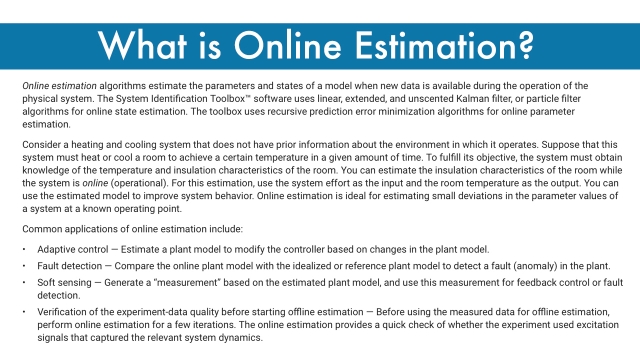
What Is Online Estimation?
Beginner
Article / Blog
Theory
This Mathworks document describes online estimation. Online estimation algorithms estimate the parameters and states of a model when new data is available during the operation of the...
See More
DSP Related
Beginner
Article / Blog
Application
Website with a lot of good content for any DSP scientists, researchers, and developers.
See More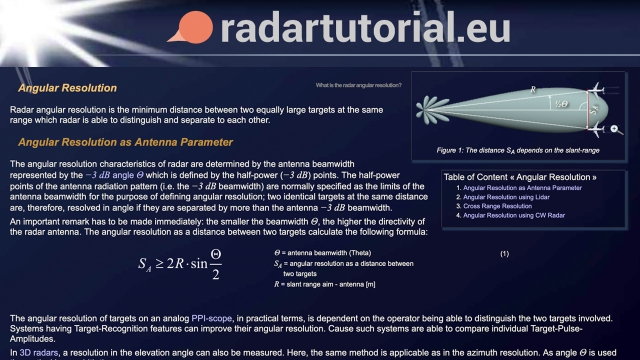
Radar Angular Resolution
Beginner
Article / Blog
Theory
This radartutorial.eu page describes angular resolution. Radar angular resolution is the minimum distance between two equally large targets at the same range which radar is able to...
See More