

Autonomous Navigation, Part 4: Path Planning with A* and RRT
18 min
Beginner
Video
Theory
This video explores some of the ways that we can use a map like a binary occupancy grid for motion and path planning. We briefly cover what motion planning means and how we can use a graph...
See More
Understanding PID Control, Part 4: A PID Tuning Guide
12 min
Beginner
Video
Theory
It can be difficult to navigate all the resources that promise to explain the secrets of PID tuning. Some proclaim that PID tuning is an art that requires finesse and experience, while...
See More
What Are Dynamic Models? Chapter 1 from Dynamic Models in Biology
Beginner
Book
Theory
Throughout this book we use a wide-ranging set of case studies to illustrate different aspects of models and modeling. In this introductory chapter we describe and give examples of different...
See More
FMCW Radar for Autonomous Vehicles | Understanding Radar Principles
18 min
Beginner
Video
Theory
Watch an introduction to Frequency Modulated Continuous Wave (FMCW) radar and why it’s a good solution for autonomous vehicle applications. This demonstration will show how FMCW radar can...
See More
System Identification Methods
17 min
Beginner
Video
Theory
System Identification is the process of determining the model or the equations of motion for your system. This is incredibly important because basing a control system design off of a bad...
See More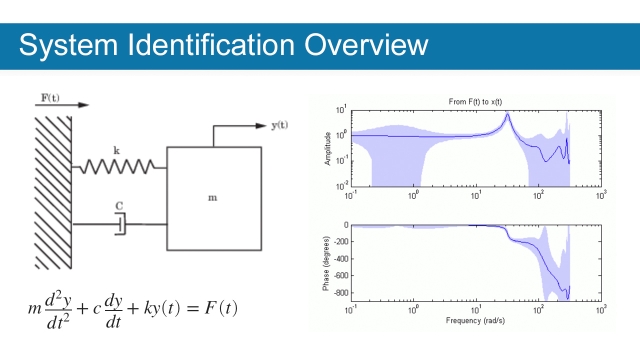
System Identification Overview
Beginner
Article / Blog
Theory
System identification is a methodology for building mathematical models of dynamic systems using measurements of the input and output signals of the system. This overview from Mathworks...
See More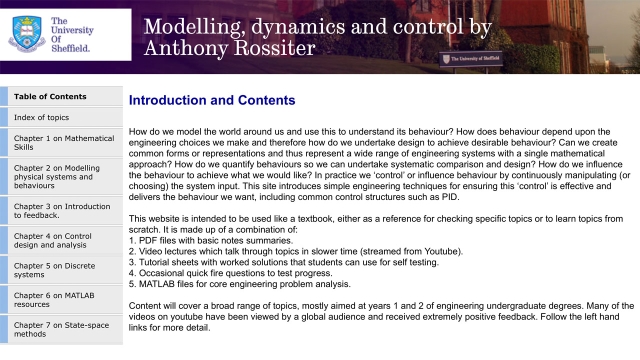
Modelling, dynamics and control
Beginner
Course
Theory
How do we model the world around us and use this to understand its behaviour? How does behaviour depend upon the engineering choices we make and therefore how do we undertake design to...
See More
MATLAB toolbox for control 101 course
Beginner
Software
Theory
Community toolbox project led by Anthony Rossiter and sponsored by MathWorks. The project incorporates input from various international collaborators. The aim is to make the developed...
See More
Block Diagram Algebra
89 min
Beginner
Video
Theory
In this video we introduce block diagrams (AKA signal flow diagrams). We explore how they are used to describe complex systems as well as how to perform blo...
See More
Discrete control #2: Discretize! Going from continuous to discrete domain
24 min
Beginner
Video
Theory
This is the second video in the discrete control series. It focuses on discretizing a continuous system - getting to the z-domain from the s-domain.
See More
Learning From Data
Beginner
Course
Theory
This is an introductory course in machine learning (ML) that covers the basic theory, algorithms, and applications. ML is a key technology in Big Data, and in many financial, medical...
See More
Control Systems in Practice, Part 8: The Gang of Six in Control Theory
18 min
Beginner
Video
Theory
When analyzing feedback systems, we can get caught up thinking solely about the relationship between the reference signal and the output. However, to fully understand how a feedback system...
See More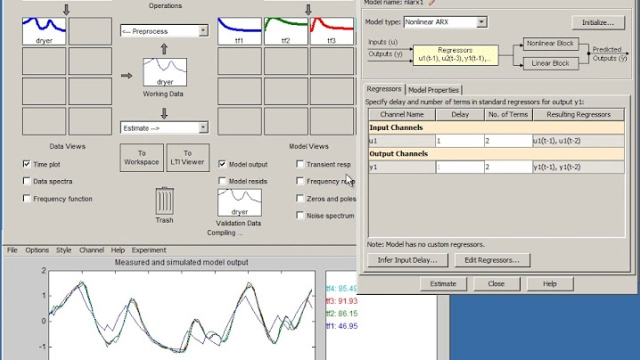
Introduction to System Identification
46 min
Beginner
Video
Theory
In this webinar, you will have a unique chance to learn about system identification from a world-renowned subject expert, Professor Lennart Ljung. Professor Ljung will explain the basic...
See More
Drone Simulation and Control, Part 1: Setting Up the Control Problem
14 min
Beginner
Video
Theory
Quadcopters and other styles of drones are extremely popular, partly because they have sophisticated programmed control systems that allow them to be stable and fly autonomously with very...
See More
But what is the Fourier Transform? A visual introduction.
20 min
Beginner
Video
Theory
An animated introduction to the Fourier Transform.
See More
Machine Learning & Text Processing Lectures
Beginner
Video
Theory
This is the video lecture collection by Victor Lavrenko.
See More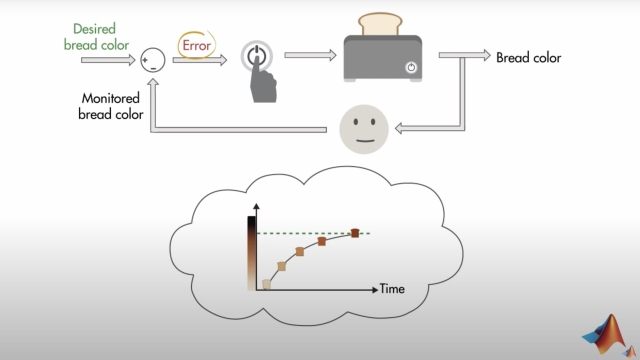
Understanding Control Systems: Feedback Control Systems
6 min
Beginner
Video
Theory
This video provides introductory examples to learn about the basics of feedback control (closed-loop control) systems.
Learn how feedback control is used to automate processes and discover...
See More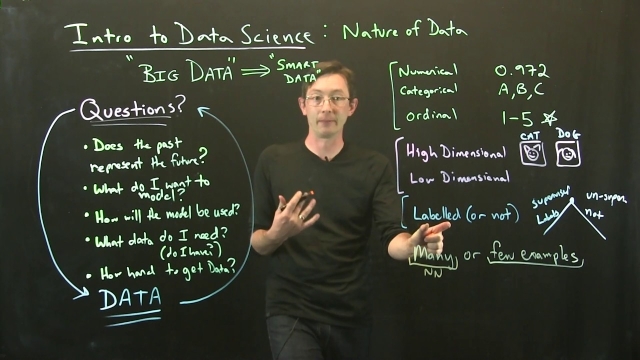
Intro to Data Science: The Nature of Data
12 min
Beginner
Video
Theory
This lecture discusses the types of data you might encounter, and how it determines which techniques to use.
See More
Trimming and Linearization, Part 2: The Practical Side of Linearization
11 min
Beginner
Video
Theory
With a general understanding of linearization, you might run into a few snags when trying to linearize realistic nonlinear models. These snags can be avoided if you have a more practical...
See More
Nyquist Stability Criterion, Part 2
18 min
Beginner
Video
Theory
An explanation of the Nyquist Stability Criterion part 2. This video steps through the how to sketch a Nyquist plot by hand, what to do if there are open loop pools on the imaginary axis...
See More
Discrete control #6: z-plane warping and the bilinear transform
25 min
Beginner
Video
Theory
We’re continuing our journey through discrete control and in this video, we’re going to expand our understanding of the bilinear transform. Along the way, we’ll learn about how this...
See More
EGGN 510 - Lecture 02-1 Digital Image Fundamentals
9 min
Beginner
Video
Theory
This is a video lecture of EGGN 510 Image and Multidimensional Signal Processing by William Hoff.
See More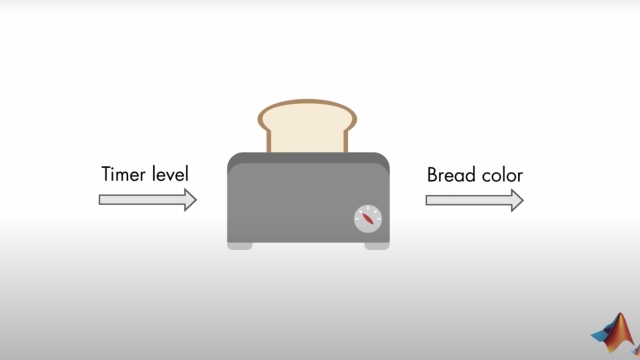
Understanding Control Systems: Open-Loop Control Systems
6 min
Beginner
Video
Theory
This video explores open-loop control systems by walking through some introductory examples.
Learn how open-loop systems are found in everyday appliances like toasters or showers, and...
See More
Process Dynamics and Control Course
Beginner
Course
Theory
This course focuses on a complete start to finish process of physics-based modeling, data driven methods, and controller design. Although some knowledge of computer programming is required...
See More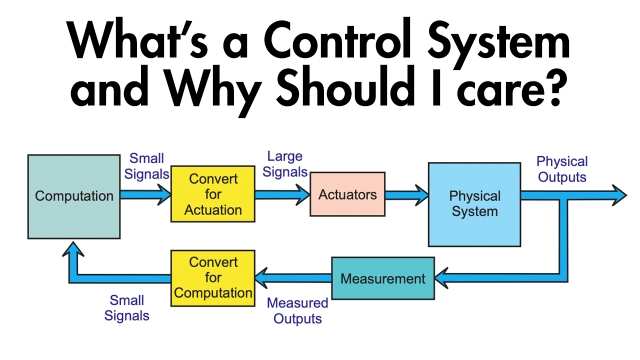
What's a Control System and Why Should I Care?
Beginner
Article / Blog
Theory
This paper is designed as a primer for college level STEM students about to take their first formal class in feedback control systems. This means that the explanations assume the reader has...
See More