


IMC based PID Design for a First Order Process
8 min
Beginner
Video
Theory
IMC based PID Design for a First Order Process
See More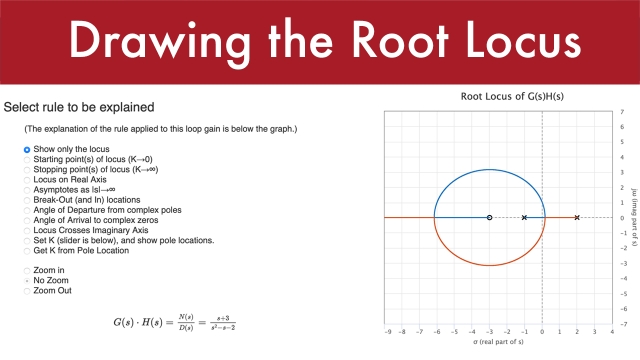
Drawing the root locus (Interactive Tool)
Beginner
App
Theory
This page was developed to help student learn how to sketch the root locus by hand. You can enter a numerator and denominator for G(s)H(s) (i.e., the loop gain) and the program will guide...
See More
Linear Systems of Equations, Least Squares Regression, Pseudoinverse
11 min
Beginner
Video
Theory
This video describes how the SVD can be used to solve linear systems of equations. In particular, it is possible to solve nonsquare systems (overdetermined or underdetermined) via least...
See More
Transfer Function to State Space
56 min
Beginner
Video
Theory
In this video we show how to transform a transfer function to an equivalent state space representation. We will derive various transformations such as contr...
See More
PID Control with Posicast Control 8 - ( In English )
7 min
Beginner
Video
Theory
This is the follow up of PID Control with Posicast ( Part II )
See More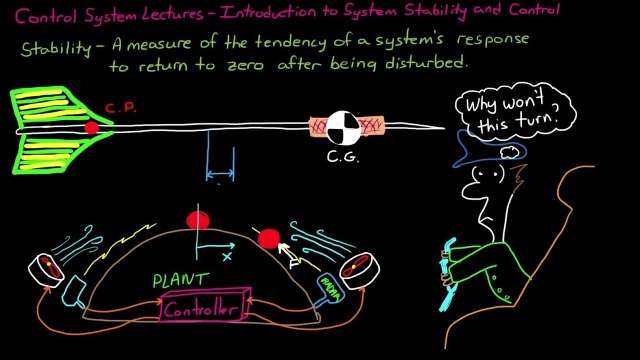
Introduction to System Stability and Control
11 min
Beginner
Video
Theory
This video attempts to provide an intuitive understanding of concepts like stability and stability margin. I briefly describe both of these topics with examples and explain how you can...
See More
Understanding and Sketching the Root Locus
176 min
Beginner
Video
Theory
In this video we discuss how to sketch the root locus for a system by developing a series of 5 core rules augmented by 5 supplemental rules (for a total of 1...
See More![Controllability, Reachability, and Eigenvalue Placement [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_304.jpg?itok=qj48C5IZ)
Controllability, Reachability, and Eigenvalue Placement [Control Bootcamp]
10 min
Beginner
Video
Theory
This lecture explains the equivalence of controllability, reachability, and the ability to arbitrarily place eigenvalues of the closed loop system.
See More
Understanding Sensor Fusion and Tracking, Part 1: What Is Sensor Fusion?
12 min
Beginner
Video
Theory
This video provides an overview of what sensor fusion is and how it helps in the design of autonomous systems. It also covers a few scenarios that illustrate the various ways that sensor...
See More
Deriving Percent Overshoot, Settling Time, and Other Performance Metrics
59 min
Beginner
Video
Theory
In this video we examine a second order dynamic system and derive how various performance metrics (such as time to first peak, magnitude at first peak, perce...
See More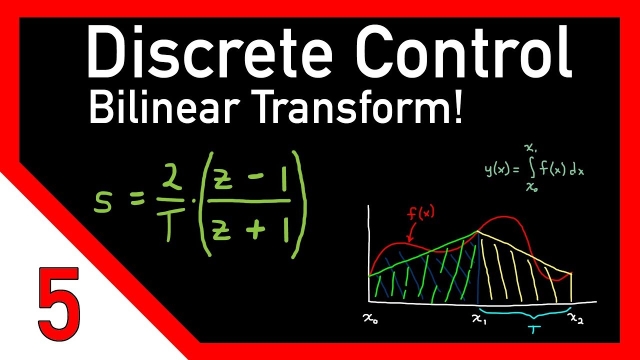
Discrete control #5: The bilinear transform
15 min
Beginner
Video
Theory
This is video number five on discrete control and here, we’re going to cover the famous and useful bilinear transform. The bilinear transform is yet another method for converting, or mapping...
See More
Standard HW Problem #2: Which is the real open loop transfer function?
13 min
Beginner
Video
Theory
In this video, we’ll go through another standard homework problem so you can see how you can apply many of the things you’re learning into a single problem. The question is, we have two...
See More
Frequency domain – tutorial 8: frequency spectra
9 min
Beginner
Video
Theory
In this video, we learn about frequency spectra which can be divided into two parts: phase and magnitude spectrum. Some examples will be provided to practice...
See More
Fourier Series: Part 1
12 min
Beginner
Video
Theory
This video will show how to approximate a function with a Fourier series, which is an infinite sum of sines and cosines. We will discuss how these sines and cosines form a basis for the...
See More
Frequency domain – tutorial 11: equalization
11 min
Beginner
Video
Theory
In this video, we learn about equalization technique which is used in communication systems to compensate for the destructive effect of the channel between t...
See More
Lecture 24: Stability using Bode plots
46 min
Beginner
Video
Theory
Particle Filter Explained without Equations
7 min
Beginner
Video
Theory
This video provides a quick graphical introduction to the particle filter. It does a good job building some intuition behind the filter without ever touching on any mathematics. It's worth a...
See More
Peter Ponders PID - KalmanFilters, Alpha-Beta-Gamma filters
16 min
Beginner
Video
Theory

Lecture 27: Lead Compensator Design using Bode plots
70 min
Beginner
Video
Theory

Inputs and Outputs as defined by a Process Control Engineer
7 min
Beginner
Video
Theory
Defining process inputs and outputs is a lot more complicated than I initially thought when I was learning about process control. In this video, I share how ...
See More
Peter Ponders PID - System Identification Advanced
19 min
Beginner
Video
Theory

Lecture 1 Introduction to Automatic Control
29 min
Beginner
Video
Theory

")
Control Bootcamp: Linear Quadratic Gaussian (LQG)
8 min
Beginner
Video
Theory
This lecture combines the optimal full-state feedback (e.g., LQR) with the optimal full-state estimator (e.g., LQE or Kalman Filter) to obtain the sensor-based linear quadratic Gaussian (LQG...
See More
Introduction to Ordinary Differential Equations
35 min
Beginner
Video
Theory
In this video we introduce the concept of ordinary differential equations (ODEs). We give examples of how these appear in science and engineering as well as...
See More