

Posicast Control 4 - ( In English )
12 min
Beginner
Video
Theory
This video continues to explore the gantry crame control simulations in open-loop- The main focus is the half-cycle Posicast.
See More
Control Systems Lectures - LTI Systems
7 min
Beginner
Video
Theory
This lecture describes what it means when we say a system is linear and time invariant. I also try to give an example as to why these systems are so important when designing control systems...
See More
Understanding and Sketching the Root Locus
176 min
Beginner
Video
Theory
In this video we discuss how to sketch the root locus for a system by developing a series of 5 core rules augmented by 5 supplemental rules (for a total of 1...
See More
Machine Learning Overview
7 min
Beginner
Video
Theory
This lecture provides an overview of machine learning, and how it fits into this introductory video sequence on data science. We discuss how machine learning involves "modeling with data".
See More
Understanding Sensor Fusion and Tracking, Part 1: What Is Sensor Fusion?
12 min
Beginner
Video
Theory
This video provides an overview of what sensor fusion is and how it helps in the design of autonomous systems. It also covers a few scenarios that illustrate the various ways that sensor...
See More
Deriving Percent Overshoot, Settling Time, and Other Performance Metrics
59 min
Beginner
Video
Theory
In this video we examine a second order dynamic system and derive how various performance metrics (such as time to first peak, magnitude at first peak, perce...
See More
Why Learn Control Theory
5 min
Beginner
Video
Theory
In this video I present a few reasons why learning control theory is important and try to give some motivation to continue learning.
See More
Neural Networks: Caveats
8 min
Beginner
Video
Theory
This lecture discusses some key limitations of neural networks and suggests avenues of ongoing development.
See More
Standard HW Problem #2: Which is the real open loop transfer function?
13 min
Beginner
Video
Theory
In this video, we’ll go through another standard homework problem so you can see how you can apply many of the things you’re learning into a single problem. The question is, we have two...
See More
Frequency domain – tutorial 2: Fourier series
25 min
Beginner
Video
Theory
In this video, we learn Fourier series which enables us to travel from time to the frequency domain when a signal is periodic. The following materials are co...
See More
Tuning a Fuzzy Logic Controller with Data | Fuzzy Logic, Part 4
18 min
Beginner
Video
Theory
This video covers the basics of data-driven approaches to tuning fuzzy inference systems. See what it means to find an optimal solution, which fuzzy inference parameters are being tuned...
See More
Time domain - tutorial 1: what is signal processing?
1 min
Beginner
Video
Theory
In this video, we review the concept of signal processing and why it is useful to learn it. Learn Signal Processing 101 in 31 lectures covering time, frequen...
See More
Basic Control Lectures
Beginner
Presentation
Theory
Systems approach, understanding and describing the operation of systems and methods of controlling them are among the basic knowledge of engineering education. But understanding the main...
See More
Bode Stability Criterion in Frequency Response Analysis Intro
12 min
Beginner
Video
Theory
The Bode stability criterion allows us to quickly determine the stability and relative stability of a transfer function. It uses a graphical method that can ...
See More
Lecture 13: Stability and Routh Hurwitz criterion
31 min
Beginner
Video
Theory

Feedforward Control Intro
7 min
Beginner
Video
Theory
If we know how a disturbance will affect an output, we can proactively change our manipulated variable to counteract it.
See More
Peter Ponders PID - Simulation Methods, Which is Best?
22 min
Beginner
Video
Theory

Lecture 15: Root Locus
53 min
Beginner
Video
Theory

Direct Synthesis for PID Design Intro
11 min
Beginner
Video
Theory
Direct Synthesis for PID Design Intro
See More
Peter Ponders PID - System Identification Basics
11 min
Beginner
Video
Theory

Lecture 7: More on Signal Flow Graphs and Block Diagram Reduction
44 min
Beginner
Video
Theory

Introduction to Ordinary Differential Equations
35 min
Beginner
Video
Theory
In this video we introduce the concept of ordinary differential equations (ODEs). We give examples of how these appear in science and engineering as well as...
See More
Matrix Completion and the Netflix Prize
6 min
Beginner
Video
Theory
This video describes how the singular value decomposition (SVD) can be used for matrix completion and recommender systems.
See More
Cartesian, Polar, Cylindrical, and Spherical Coordinates
54 min
Beginner
Video
Theory
In this video we discuss Cartesian, Polar, Cylindrical, and Spherical coordinates as well as develop forward and reverse transformations to go from one coord...
See More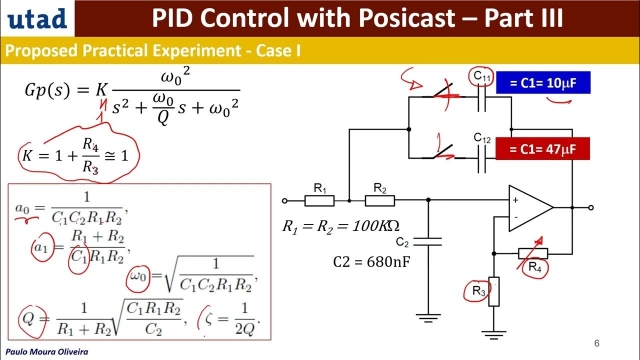
PID Control with Posicast, 9 - (In English)
11 min
Beginner
Video
Theory
This is part III of PID control with Posicast
See More