


Laplace domain – tutorial 1: Laplace transform
15 min
Beginner
Video
Theory
In this video, we learn about Laplace transform which enables us to travel from time to the Laplace domain. The following materials are covered:1) why we nee...
See More![SVD: Image Compression [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_420.jpg?itok=m_mtp3IT)
SVD: Image Compression [Python]
9 min
Beginner
Video
Application
This video describes how to use the singular value decomposition (SVD) for image compression in Python.
See More
Peter Ponders PID - Observers/Estimators
26 min
Beginner
Video
Theory
Particle Filter Explained without Equations
7 min
Beginner
Video
Theory
This video provides a quick graphical introduction to the particle filter. It does a good job building some intuition behind the filter without ever touching on any mathematics. It's worth a...
See More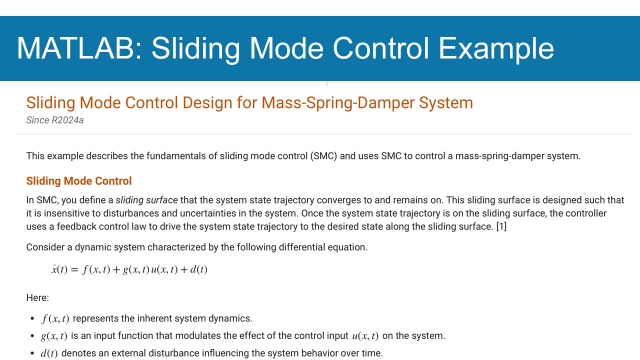
Sliding Mode Control Design for Mass-Spring-Damper System
Intermediate
Example
Application
This MATLAB/Simulink example describes the fundamentals of sliding mode control (SMC) and uses SMC to control a mass-spring-damper system.
See More
Frequency domain – tutorial 9: frequency response
23 min
Beginner
Video
Theory
In this video, the learning objectives are to:1- fully understand the frequency response which forms the foundation of filtering 2- quickly review the common...
See More![Linear Regression 1 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_436.jpg?itok=dYATpI15 "Linear Regression 1 [Python]")
Linear Regression 1 [Python]
6 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for linear regression in Python (part 1).
See More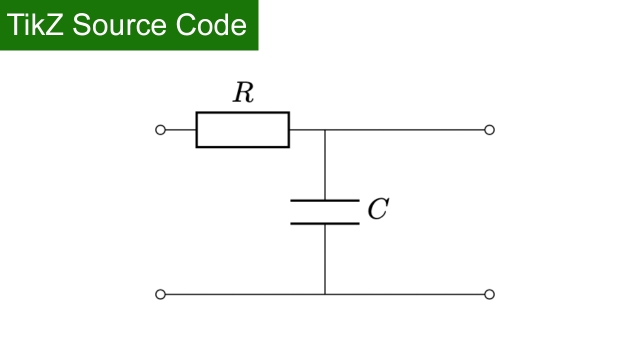
TikZ source Code: RC Lowpass
Beginner
Source Code
Application
TikZ source code for an RC Lowpass filter.
See More
Dynamic Behavior and Input Types in Process Control
13 min
Beginner
Video
Theory
An introduction to the four types of dynamic behavior and five types of inputs (step, ramp, pulse, impulse, and sinusoidal), and why transfer functions are u...
See More
Extremum Seeking Control: Challenging Example
8 min
Intermediate
Video
Theory
This lecture explores the use of extremum-seeking control (ESC) to solve a challenging control problem with a right-half plane zero.
See More