


Solving the 1D Heat Equation
47 min
Beginner
Video
Theory
In this video we simplify the general heat equation to look at only a single spatial variable, thereby obtaining the 1D heat equation. We solving the result...
See More
Expressing Vectors in Different Frames Using Rotation Matrices
45 min
Intermediate
Video
Theory
In this video we develop notation to express a vector in different reference/coordinate frames. We then investigate how to use rotation matrices to translate from a vector expressed in one...
See More
Extremum Seeking Control in Simulink
26 min
Beginner
Video
Application
This lecture explores extremum-seeking control (ESC) on a simple example in Matlab’s Simulink.
See More
Machine Learning Control: Genetic Programming Control
10 min
Beginner
Video
Theory
This lecture discusses the use of genetic programming to manipulate turbulent fluid dynamics in experimental flow control.
See More
Frequency domain – tutorial 6: Fourier transform tables
34 min
Beginner
Video
Theory
In this video, we learn about Fourier transform tables which enable us to quickly travel from time to the frequency domain. The main learning objective is to...
See More![Introduction to Deep Learning by Andrew NG [COMPLETE]](/sites/default/files/styles/search_resulkts/public/2022-01/intro_DL_0.jpg?itok=jS-vFChN)
Introduction to Deep Learning by Andrew NG [COMPLETE]
Beginner
Video
Theory
Andrew Ng's course on deep learning and neural networks.
See More
Vector Derivatives (the Equation of Coriolis) and the Angular Velocity Vecto...
72 min
Intermediate
Video
Theory
In this video we develop the Equation of Coriolis which describes how a vector in a rotating reference frame changes from the perspective of an observer in a non-rotating reference frame. We...
See More![Fourier Series and Gibbs Phenomena [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_364.jpg?itok=-v1tvO0q "Fourier Series and Gibbs Phenomena [Python]")
Fourier Series and Gibbs Phenomena [Python]
8 min
Beginner
Video
Application
This video will describe how to compute the Fourier Series in Python and Gibbs Phenomena that appear for discontinuous functions.
See More
Understanding Model Predictive Control, Part 5: How To Run MPC Faster
7 min
Beginner
Video
Theory
This video starts by providing quick tips for implementing MPC for fast applications. If you need to further decrease the sample time for your fast applications, you can use explicit MPC...
See More")
Course Introduction (Signal Processing 101)
2 min
Beginner
Video
Theory
Learn Signal Processing 101 in 31 lectures covering time, frequency and Laplace domain in about 8 hours all together:https://www.youtube.com/watch?v=KZd68xga...
See More
Posicast Control -3 - ( In English )
8 min
Beginner
Video
Theory
In this video a Gantry-Crane control simulation problem is introduced. The problem is presented and some introductory simulations are shown.
See More
Finding Transfer Functions from Response Graphs
9 min
Beginner
Video
Theory
Given a system response to a unit step change, in this video I'll cover how we can derive the transfer function so we can predict how our system will respond...
See More
Peter Ponders PID - Yet Another Linear Quadratic Control Video but...
22 min
Beginner
Video
Theory

Lecture 18: PI and Lag Compensator Design using Root Locus
41 min
Beginner
Video
Theory

Simple Examples of PID Control
13 min
Beginner
Video
Theory
In this video I continue the topic of PID control. We walk through a simple control system and visualize how each of the three paths, P, I, and D, all address specific problems that arise...
See More
Second Order Dynamics Example
4 min
Beginner
Video
Theory
How will a second order process respond in the time domain when subjected to a unit step input? What other behaviors can we expect to see and why? Tune in to...
See More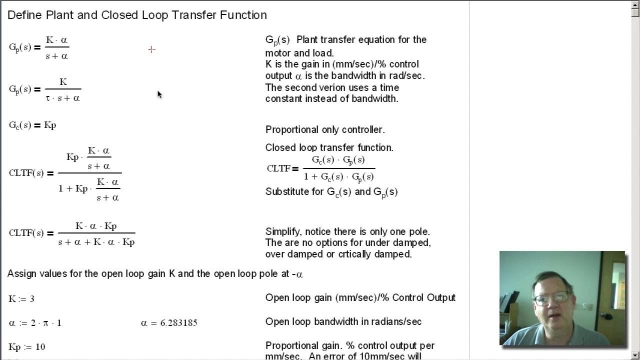
Peter Ponders PID - Controlling non-integrating single pole system. Part 1 ...
10 min
Beginner
Video
Theory
Part 1 shows why P only control shouldn't be used because the set point or target is never reached.Part 2 shows why I only control shouldn't be used because ...
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 11 - Fast Rei...
79 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Lecture 10: Second Order Underdamped Systems: Unit step response and time do...
23 min
Beginner
Video
Theory
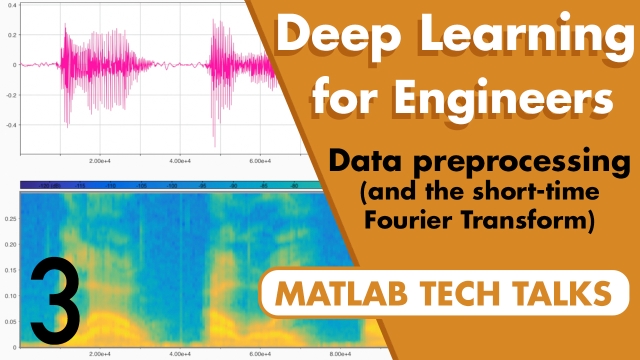
Data Preprocessing and the Short-Time Fourier Transform | Deep Learning for ...
16 min
Beginner
Video
Theory
Data in its raw form might not be ideal for training a network. There are some changes we can make to the data that are often desired or sometimes necessary in order to make training faster...
See More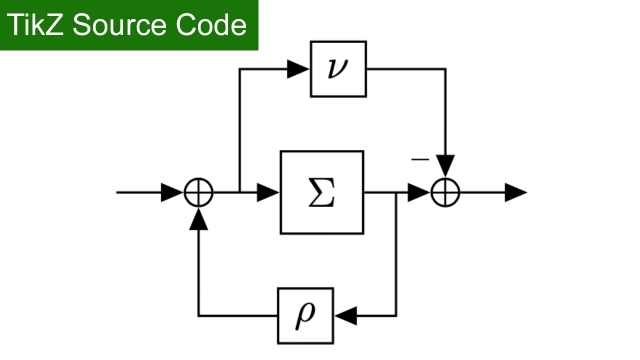
TikZ source Code: Both passivity indices applied
Beginner
Source Code
Application
TikZ source Code: Both passivity indices applied.
See More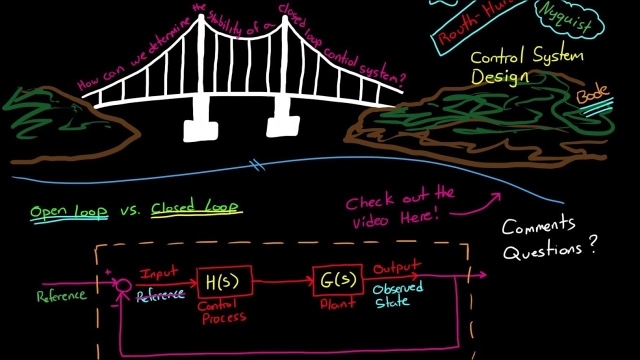
Stability of Closed Loop Control Systems
11 min
Beginner
Video
Theory
This video explains why we need design tools like the Routh-Hurwitz Criterion, Bode Plots, Nyquist Plots, and Root Locus. This is an introduction into the difficulties of determining the...
See More
Control Bootcamp: Laplace Transforms and the Transfer Function
19 min
Beginner
Video
Theory
Here we show how to compute the transfer function using the Laplace transform.
See More
Sketching Root Locus Part 2
16 min
Beginner
Video
Theory
This is the second part of how to sketch a root locus by hand. However instead of following the normal rules for sketching a locus that you'd see in a book, I decided to explain the rules...
See More
Control Bootcamp: Example Frequency Response (Bode Plot) for Spring-Mass-Da...
18 min
Beginner
Video
Theory
This video shows how to compute and interpret the Bode plot for a simple spring-mass-damper system.
See More