


Understanding Model Predictive Control, Part 2: What is MPC?
6 min
Beginner
Video
Theory
Learn how model predictive control (MPC) works. Using a simple car example, this video provides insight into an MPC controller’s strategy for finding the optimal steering wheel angle to...
See More
Time domain - tutorial 5: signal properties
11 min
Beginner
Video
Theory
In this video, we learn about some special signals which are symmetric around the y-axis (even) or around the origin (odd) . Then we talk about periodic sign...
See More
Euler Angles and the Euler Rotation Sequence
70 min
Intermediate
Video
Theory
In this video we discuss how Euler angles are used to define the relative orientation of one coordinate frame to another.
See More
The Fourier Transform and Derivatives
10 min
Beginner
Video
Theory
This video describes how the Fourier Transform can be used to accurately and efficiently compute derivatives, with implications for the numerical solution of differential equations.
See More
Posicast Control 4 - ( In English )
12 min
Beginner
Video
Theory
This video continues to explore the gantry crame control simulations in open-loop- The main focus is the half-cycle Posicast.
See More
Frequency domain – tutorial 10: modulation
22 min
Beginner
Video
Theory
In this video, we learn about modulation technique which is commonly used in communication systems to send information from transmitter to receiver. The foll...
See More
Control Systems with MATLAB - Time Domain Analysis
35 min
Beginner
Video
Theory

Peter Ponders PID - LQR Optimizing Two Outputs
16 min
Beginner
Video
Theory

Closed Loop Feedback Control
13 min
Beginner
Video
Theory
Intro to closed loop (feedback) control motivation, theory, block diagrams and block diagram algebra, and PID controllers
See More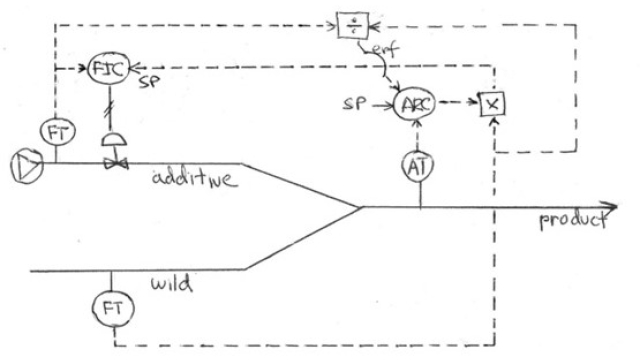
Ratio Control and Scaled Signal Calculations
15 min
Intermediate
Article / Blog
Application
When and how to use ratio, and how to implement within standard scaled signals
See More
Tutorial on Root Locus
56 min
Beginner
Video
Theory
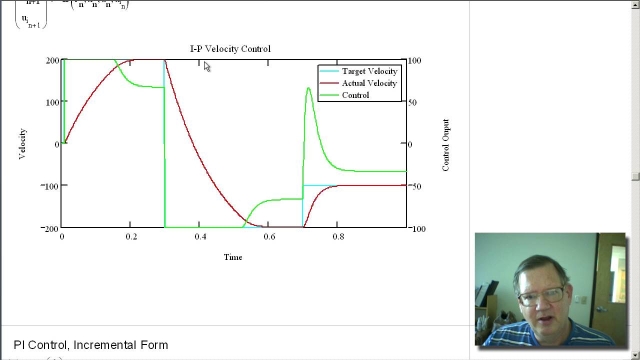
Peter Ponders PID - Controlling a non-integrating single pole system. Part 3...
9 min
Beginner
Video
Theory
Part 3 uses PI control which is the only practical means of control a non-integrating single pole system.http://deltamotion.comhttp://forum.deltamotion.com
See More
Bode Plot Gain and Phase Margin Determination
5 min
Beginner
Video
Theory
I'll show you how we can determine the Gain and Phase Margin from a Bode Plot (at some fixed controller gain).
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 4 - Model Fre...
78 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Humans, Robots, and Non-Prehensile Manipulation
12 min
Beginner
Video
Theory
This is a fun video that was inspired by a presentation I saw at the 2015 International Conference on Robotics and Automation (ICRA). I wanted to see if humans could duplicate the...
See More
Lecture 6: Signal Flow Graphs and Mason's Gain Rule
47 min
Beginner
Video
Theory
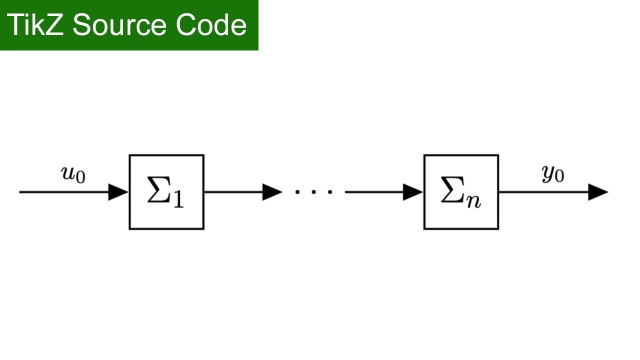
TikZ source Code: Cascade of several subsystems
Beginner
Source Code
Application
TikZ source Code: Cascade of several subsystems.
See More
Transfer Function to State Space
56 min
Beginner
Video
Theory
In this video we show how to transform a transfer function to an equivalent state space representation. We will derive various transformations such as contr...
See More
RL Course by David Silver - Lecture 10: Classic Games
111 min
Intermediate
Video
Theory
An overview of Game Theory, minimax search, self-play and imperfect information games.
See More
Understanding Sensor Fusion and Tracking, Part 2: Fusing a Mag, Accel, and G...
16 min
Beginner
Video
Theory
This video describes how we can use a magnetometer, accelerometer, and a gyro to estimate an object’s orientation. The goal is to show how these sensors contribute to the solution, and to...
See More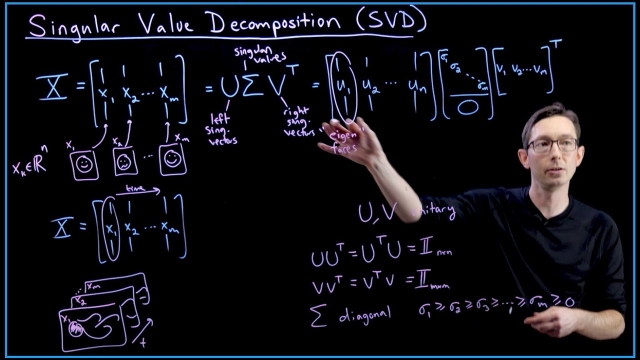
Singular Value Decomposition (SVD): Mathematical Overview
12 min
Intermediate
Video
Theory
This video presents a mathematical overview of the singular value decomposition (SVD).
See More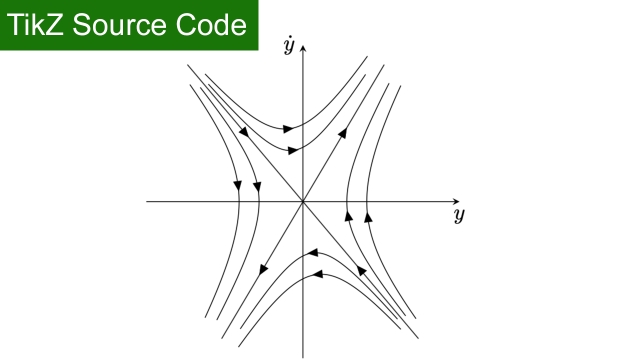
TikZ source Code: Sliding Mode Control Example System 1
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example System 1
See More
Gaussian/Normal Distributions
99 min
Beginner
Video
Theory
In this video we discuss the Gaussian (AKA Normal) probability distribution function. We show how it relates to the error function (erf) and discuss how to ...
See More
Data-Driven Control: Eigensystem Realization Algorithm Procedure
17 min
Intermediate
Video
Theory
In this lecture, we describe the eigensystem realization algorithm (ERA) in detail, including step-by-step algorithmic instructions.
See More![SVD: Importance of Alignment [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_421.jpg?itok=xDlrjOXt)
SVD: Importance of Alignment [Matlab]
6 min
Beginner
Video
Application
This video describes the importance of aligning data when using the singular value decomposition (SVD) (Matlab code).
See More