

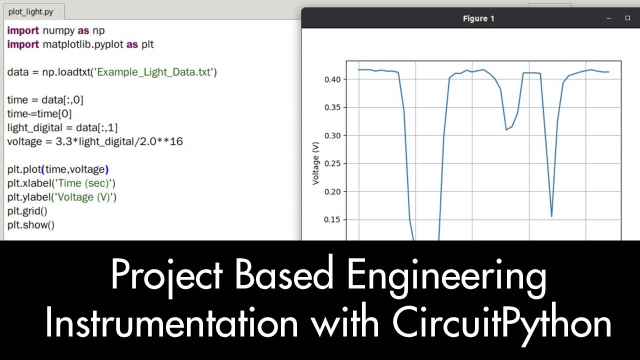
Project Based Engineering Instrumentation with CircuitPython
Beginner
Book
Application
This textbook has been designed with the student and faculty member in mind. First, this textbook goes hand in hand with Engineering Instrumentation taught at the undergraduate level at many...
See More
Derivation of Rodrigues’ Rotation Formula
43 min
Intermediate
Video
Theory
In this video we explain and derive Rodrigues’ Rotation Formula. This functions describes how to rotate an arbitrary vector about another arbitrary axis of rotation. This has applications to...
See More
Laplace domain – tutorial 3: Laplace transform tables
17 min
Beginner
Video
Theory
In this video, we cover Laplace transform tables which help us to quickly find Laplace and inverse Laplace transforms. The main learning objective is to full...
See More")
Introduction to the Fourier Transform (Part 2)
12 min
Beginner
Video
Theory
This video is the second part of the introduction to the Fourier Transform. I address an error that I made in the first video concerning the scaling term of the transform. I also try to...
See More
Neural Networks and Deep Learning
7 min
Beginner
Video
Theory
This lecture explores the recent explosion of interest in neural networks and deep learning in the context of 1) vast and increasing data sets, and 2) rapidly improving computational...
See More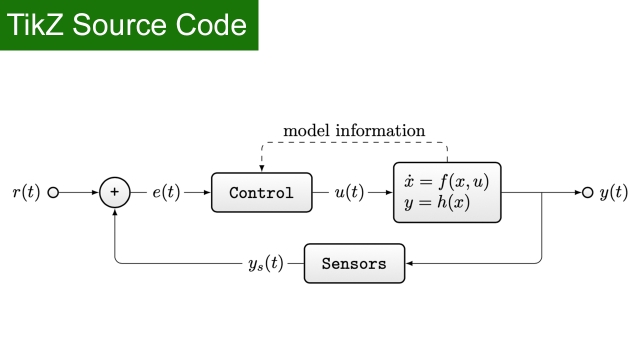
TikZ source Code: Feedback system
Beginner
Source Code
Application
TikZ source Code: Feedback system
See More
IMC PID Design of a Second Order Process
8 min
Beginner
Video
Theory
IMC PID Design of a Second Order Process
See More
Lecture 24: Stability using Bode plots
46 min
Beginner
Video
Theory
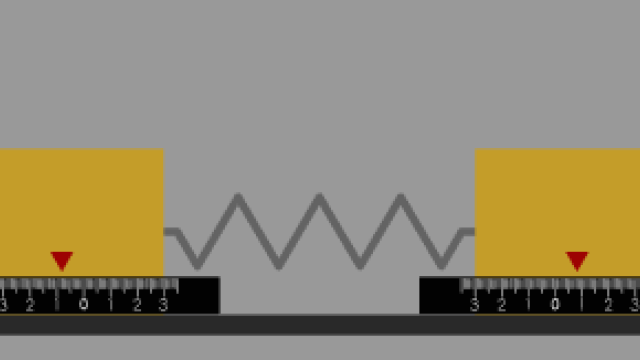
Virtual Laboratory for Vibrations and Control Theory
Intermediate
Virtual Lab
Application
This virtual lab developed in Matlab Simscape provides an innovative tool for learning and teaching fundamentals of mechanical vibrations including mass-spring-damper systems.
See More
Second Order Dynamics
3 min
Beginner
Video
Theory
A crash course overview on second order dynamics in the frequency domain, what the key parameters are, and why they matter.
See More
Lecture 22: Frequency domain specifications for Second order system
39 min
Beginner
Video
Theory

Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 7 - Imitation...
73 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
See More
Lecture 30: Canonical Forms
40 min
Beginner
Video
Theory

Overview of Dempster-Shafer Theory (Evidence Theory)
Beginner
Article / Blog
Theory
This is an overview of Dempster-Shafer Theory (Evidence Theory) that provides an introduction, definition, basic information about combination rules, some issues with the theory, and the...
See More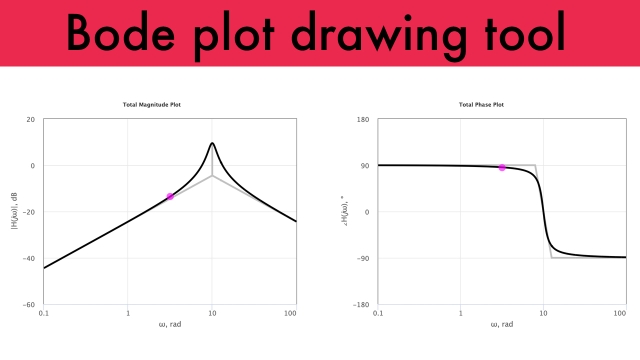
Bode Plot Drawing Tool
Intermediate
Article / Blog
Demonstration
This page demonstrates the techniques described previously to take a transfer function defined by the user, identify the constituent terms, draw the individual Bode plots, and then combine...
See More
Numerically Linearizing a Dynamic System
104 min
Beginner
Video
Theory
In this video we show how to linearize a dynamic system using numerical techniques. In other words, the linearization process does not require an analytical...
See More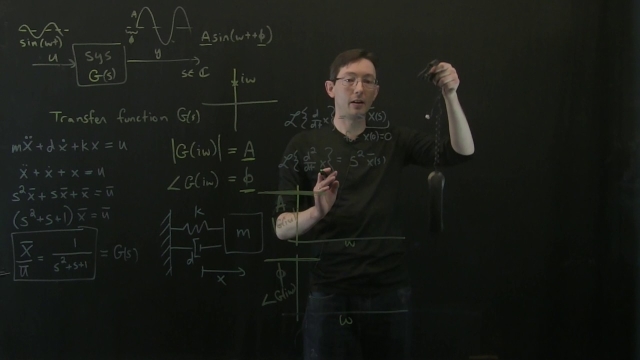
Control Bootcamp: Example Frequency Response (Bode Plot) for Spring-Mass-Da...
18 min
Beginner
Video
Theory
This video shows how to compute and interpret the Bode plot for a simple spring-mass-damper system.
See More
Designing a Lead Compensator with Root Locus
13 min
Beginner
Video
Theory
This video walks through a phase lead compensator example using the Root Locus method.
See More
Stanford CS229: Machine Learning | Autumn 2018
Beginner
Video
Theory
Autumn 2018 Stanford course on machine learning by Andrew Ng.
See More
Understanding Sensor Fusion and Tracking, Part 5: How to Track Multiple Obje...
15 min
Beginner
Video
Theory
This video describes two common problems that arise when tracking multiple objects: data association and track maintenance. We cover a few ways to solve these issues and provide a general...
See More
Partial Fraction Expansion/Decomposition
59 min
Beginner
Video
Theory
In this video we discuss how to perform partial fraction expansion (PFE) to rewrite a ratio of polynomials as simpler expressions. Topics and time stamps:(0...
See More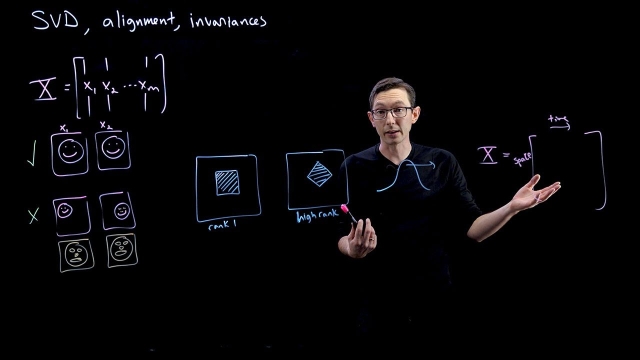
SVD and Alignment: A Cautionary Tale
7 min
Intermediate
Video
Theory
This video describes the importance of data alignment when performing the singular value decomposition (SVD). Translations and rotations both present challenges for the SVD.
See More
Posicast Control 4 - ( In English )
12 min
Beginner
Video
Theory
This video continues to explore the gantry crame control simulations in open-loop- The main focus is the half-cycle Posicast.
See More
Bode Plots of Complex Transfer Functions
65 min
Beginner
Video
Theory
In this video we discuss how to generate a bode plot of a complex transfer function by decomposing it into the individual components. We then show how one c...
See More
Data-Driven Control: Error Bounds for Balanced Truncation
11 min
Intermediate
Video
Theory
In this lecture, we derive error bounds for the balanced truncation.
See More