


CORRECTION: Bode Plots by Hand: Complex Poles or Zeros
10 min
Beginner
Video
Theory
I explain how to determine the straight-line estimate of the Bode Plot for a second order transfer function with a pair of complex poles. This video is a repeat of the last half of the Bode...
See More
Gimbal Lock in reference to the Apollo missions
4 min
Intermediate
Video
Theory
A gimbal is a pivoted support that permits rotation of an object about an axis. For this reason, a set of three axes gimbals are used in spacecrafts to help with orientation attitude control...
See More
Computing Euler Angles: Tracking Attitude Using Quaternions
74 min
Intermediate
Video
Theory
In this video we continue our discussion on how to track the attitude of a body in space using quaternions. The quaternion method is similar to the Euler Kinematical Equations and Poisson...
See More
Matrix Completion and the Netflix Prize
6 min
Beginner
Video
Theory
This video describes how the singular value decomposition (SVD) can be used for matrix completion and recommender systems.
See More
Vector Derivatives (the Equation of Coriolis) and the Angular Velocity Vecto...
72 min
Intermediate
Video
Theory
In this video we develop the Equation of Coriolis which describes how a vector in a rotating reference frame changes from the perspective of an observer in a non-rotating reference frame. We...
See More
Understanding Sensor Fusion and Tracking, Part 4: Tracking a Single Object W...
16 min
Beginner
Video
Theory
This video describes how we can improve tracking a single object by estimating state with an interacting multiple model filter. We will build up some intuition about the IMM filter and show...
See More
Cartesian, Polar, Cylindrical, and Spherical Coordinates
54 min
Beginner
Video
Theory
In this video we discuss Cartesian, Polar, Cylindrical, and Spherical coordinates as well as develop forward and reverse transformations to go from one coord...
See More
Data-Driven Control: Balancing Example
7 min
Intermediate
Video
Application
In this lecture, we give an example of how a change of coordinates can balance the controllability and observability of an input—output system.
See More![SVD: Eigenfaces 2 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_415.jpg?itok=9rg4zY8s)
SVD: Eigenfaces 2 [Python]
10 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces, in the so-called "eigenfaces" (Python code, part 2).
See More
Posicast Control -3 - ( In English )
8 min
Beginner
Video
Theory
In this video a Gantry-Crane control simulation problem is introduced. The problem is presented and some introductory simulations are shown.
See More
Understanding and Sketching the Root Locus
176 min
Beginner
Video
Theory
In this video we discuss how to sketch the root locus for a system by developing a series of 5 core rules augmented by 5 supplemental rules (for a total of 1...
See More
Discrete control #1: Introduction and overview
22 min
Beginner
Video
Theory
So far I have only addressed designing control systems using the frequency domain, and only with continuous systems. That is, we’ve been working in the S domain with transfer functions. We...
See More
Peter Ponders PID - Yet Another Linear Quadratic Control Video but...
22 min
Beginner
Video
Theory
![Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_431.jpg?itok=vs89WnA2 "Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart [Control Bootcamp]")
Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart...
13 min
Beginner
Video
Theory
Here we design an optimal full-state feedback controller for the inverted pendulum on a cart example using the linear quadratic regulator (LQR). In Matlab, we find that this is a simple one...
See More
Deriving Percent Overshoot, Settling Time, and Other Performance Metrics
59 min
Beginner
Video
Theory
In this video we examine a second order dynamic system and derive how various performance metrics (such as time to first peak, magnitude at first peak, perce...
See More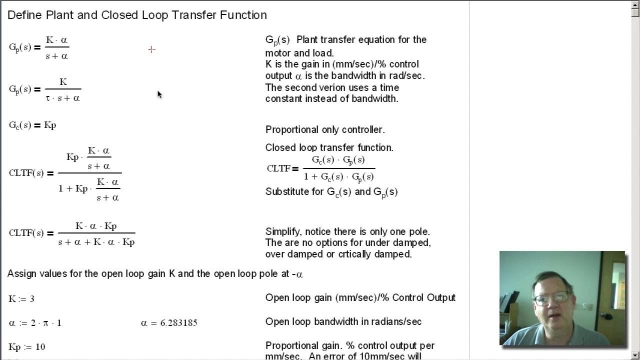
Peter Ponders PID - Controlling non-integrating single pole system. Part 1 ...
10 min
Beginner
Video
Theory
Part 1 shows why P only control shouldn't be used because the set point or target is never reached.Part 2 shows why I only control shouldn't be used because ...
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 11 - Fast Rei...
79 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Control Bootcamp: Loop Shaping Example for Cruise Control
12 min
Beginner
Video
Theory
This video demonstrates loop shaping on the cruise control model.
See More
Time domain - tutorial 3: signal transformations
11 min
Beginner
Video
Theory
In this video, we learn how different transformations can change the signal shape. Specifically, we cover time shifting & scaling as well as amplitude shift...
See More
Fourier Analysis: Overview
7 min
Beginner
Video
Theory
This video presents an overview of the Fourier Transform, which is one of the most important transformations in all of mathematical physics and engineering. This series will introduce the...
See More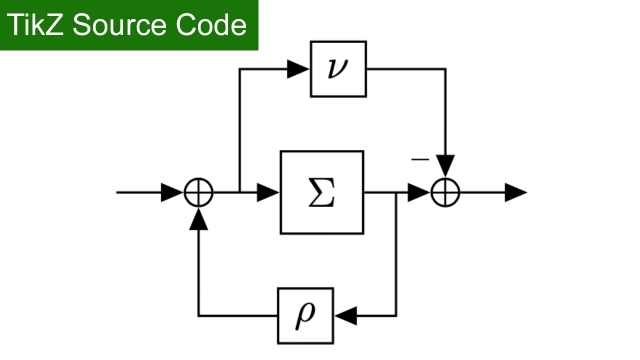
TikZ source Code: Both passivity indices applied
Beginner
Source Code
Application
TikZ source Code: Both passivity indices applied.
See More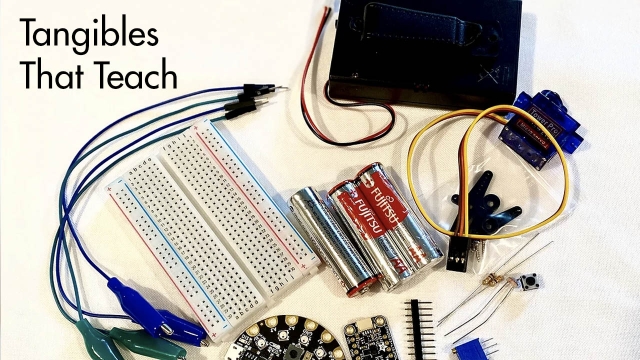
Instrument Kit for ME 316
Beginner
Hardware
Application
This hardware kit accompanies the textbook "Project Based Engineering Instrumentation with CircultPython" by Dr. Carlos Montalvo. Using this hardware and the textbook you’ll build some...
See More
Frequency domain – tutorial 7: Fourier transform examples marathon
46 min
Beginner
Video
Theory
In this video, we solve lots of lots examples to practice how to quickly find Fourier transform using table of pairs and properties. The learning objective i...
See More
The Fourier Transform and Convolution Integrals
10 min
Beginner
Video
Theory
This video describes how the Fourier Transform maps the convolution integral of two functions to the product of their respective Fourier Transforms.
See More
TikZ source Code: Example Graph
Beginner
Source Code
Application
TikZ source Code: Example Graph
See More