


The Routh-Hurwitz Stability Criterion
82 min
Beginner
Video
Theory
In this video we explore the Routh Hurwitz Stability Criterion and investigate how it can be applied to control systems engineering. The Routh Hurwitz Stabi...
See More")
Control Bootcamp: Linear Quadratic Gaussian (LQG)
8 min
Beginner
Video
Theory
This lecture combines the optimal full-state feedback (e.g., LQR) with the optimal full-state estimator (e.g., LQE or Kalman Filter) to obtain the sensor-based linear quadratic Gaussian (LQG...
See More
Peter Ponders PID-Fuzzy Logic vs PID
10 min
Beginner
Video
Theory
There are many academic and engineering papers showing how good fuzzy logic control is relative to PID control. Every FL vs PID paper I have seen compares...
See More
Using Root Locus to Meet Performance Requirements
28 min
Beginner
Video
Theory
In this video we investigate how to use the root locus technique to design a controller that meets certain performance specifications.Topics and timestamps:(...
See More
Dynamic Mode Decomposition (Code)
8 min
Intermediate
Video
Application
In this video, we code up the dynamic mode decomposition (DMD) in Matlab and use it to analyze the fluid flow past a circular cylinder at low Reynolds number.
See More
Peter Ponders PID - T0P1 Part 4, Misc Topics
20 min
Beginner
Video
Theory
This video covers another way to compute symbolic gains, the difference between having the P gain act on the error or just the feedback, extending bandwidt...
See More")
Frequency domain – tutorial 13: sampling (theory of everything in signal pro...
25 min
Beginner
Video
Theory
In this video, we learn about sampling which enables us to travel from analog to digital world. The following materials are covered:1) why traveling to the ...
See More![Denoising Data with FFT [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_358.jpg?itok=BSMOuW9N "Denoising Data with FFT [Matlab]")
Denoising Data with FFT [Matlab]
10 min
Beginner
Video
Application
This video describes how to clean data with the Fast Fourier Transform (FFT) in Matlab.
See More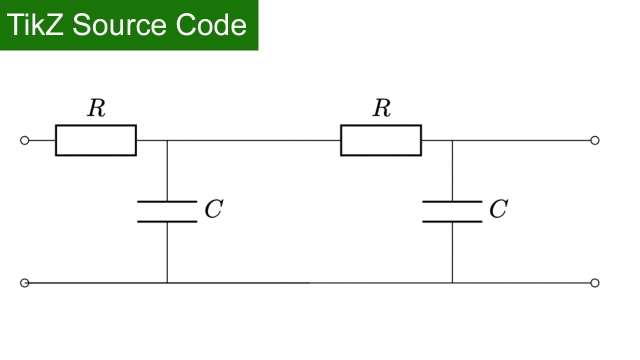
TikZ source Code: Two Interconnected RC Elements
Beginner
Source Code
Application
TikZ source Code for two Interconnected RC Elements.
See More
Velocity & Acceleration in Non-Inertial Reference Frames (Coriolis &...
133 min
Intermediate
Video
Theory
In this video we derive a mathematical description of velocity and acceleration in non-inertial reference frame. We examine the effect of fictitious forces that are witnessed by observers on...
See More
Time domain - tutorial 9: convolution examples
25 min
Beginner
Video
Theory
In this video, we use a systematic approach to solve lots of examples on convolution. By the end of this lecture, you should be able to find convolution betw...
See More
The Fast Fourier Transform Algorithm
10 min
Beginner
Video
Theory
Here I discuss the Fast Fourier Transform (FFT) algorithm, one of the most important algorithms of all time.
See More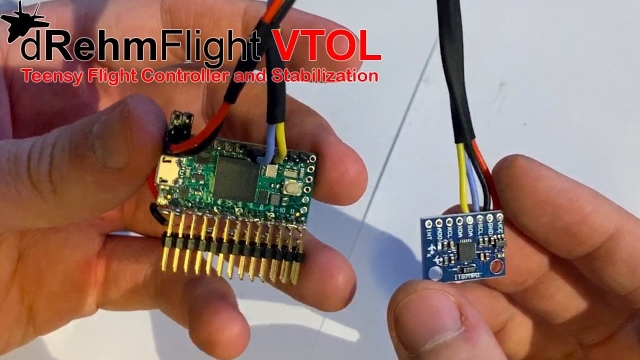
Building the Flight Controller Hardware - dRehmFlight VTOL
11 min
Beginner
Video
Application
This video will show you how to setup and solder the default recommended hardware setup for the dRehmFlight VTOL flight controller package. This hardware configuration will work with the...
See More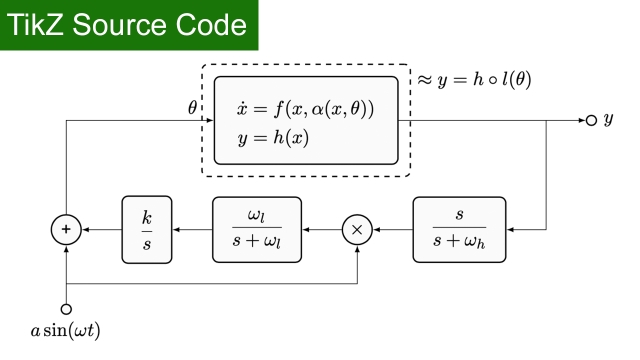
TikZ source Code: Extremum Seeking Control Block Diagram (Krstic)
Beginner
Source Code
Application
TikZ source Code: Extremum Seeking Control Block Diagram (Krstic)
See More
Routh Stability Criterion Intro and Example
13 min
Beginner
Video
Theory
I introduce and walk through an example problem of how we can use the Routh Stability Criterion to rigorously determine the necessary and sufficient conditio...
See More
Lecture 12: Steady state error
26 min
Beginner
Video
Theory

Control Bootcamp: Observability
8 min
Beginner
Video
Theory
This video explores the observability of a linear system, namely the ability to estimate the full state "x(t)" from a time-history of limited output measurements "y(t)".
See More
IMC Design of an Unstable Process Example
10 min
Beginner
Video
Theory
In this video, I cover how we can use IMC method to rigorously design a controller for an inherently unstable process (has a positive pole).
See More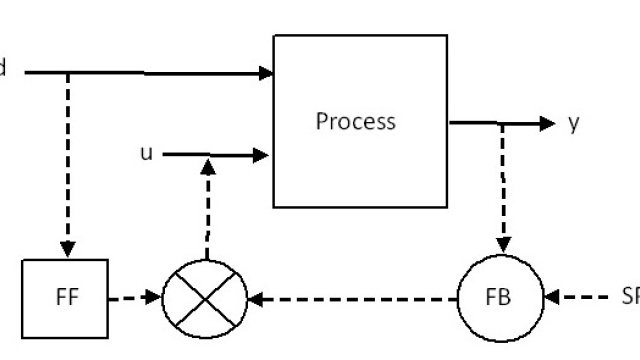
Feedforward Control
15 min
Intermediate
Article / Blog
Application
When and how to use feedforward control
See More
Lecture 26: Stability examples, GM and PM using Nyquist Stability Criterion
56 min
Beginner
Video
Theory

Lecture 17: Introduction to Compensators/Controllers
35 min
Beginner
Video
Theory

Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 15 - Batch Re...
79 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Controls Engineering in the FIRST Robotics Competition
Intermediate
Book
Application
This guide is intended to make an advanced engineering topic approachable so it can be applied by those who aren’t experts in control theory. The intended audience is high school students...
See More![Stability and Eigenvalues [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_289.jpg?itok=dbD4O7ru)
Stability and Eigenvalues [Control Bootcamp]
19 min
Beginner
Video
Theory
Here we discuss the stability of a linear system (in continuous-time or discrete-time) in terms of eigenvalues. Later, we will actively modify these eigenvalues, and hence the dynamics...
See More")
Koopman Spectral Analysis (Representations)
16 min
Intermediate
Video
Theory
In this video, we explore how to obtain finite-dimensional representations of the Koopman operator from data, using regression.
See More