

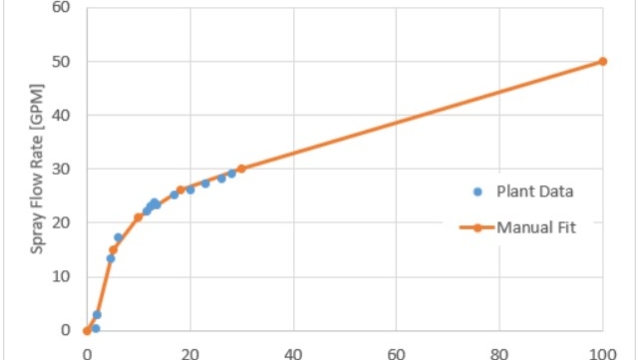
Output Characterization to Linearize a Loop - Control valve application
20 min
Intermediate
Article / Blog
Application
This application paper explains how a control valve created nonlinearity in a loop and how output characterization solved the problem
See More
Python Control Systems Library
Intermediate
Software
Application
The python-control package is a set of python classes and functions that implement common operations for the analysis and design of feedback control systems. The initial goal is to implement...
See More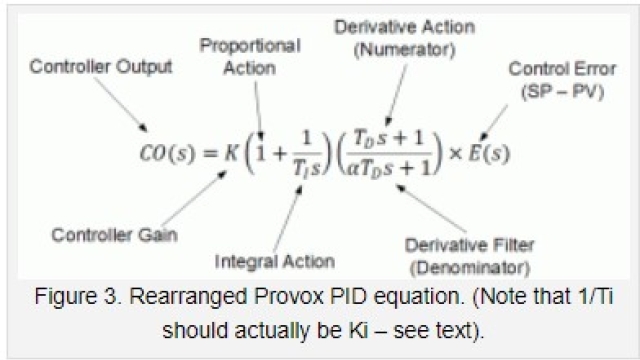
Decoding a Laplace Representation of a Controller
20 min
Intermediate
Article / Blog
Application
A how to relate the Laplace notation to the PID controller variation and features
See More
Simulink Onramp
120 min
Beginner
Tutorial
Demonstration
Learn the basics of how to create, edit, and simulate models in Simulink®. Use block diagrams to represent real-world systems and simulate components and algorithms.
See More
Data based modeling of nonlinear dynamic systems using System Identification...
Intermediate
Software
Demonstration
Using an engine throttle valve modeling example, this demo shares some perspectives on creation of nonlinear models of dynamic systems from the measurements of its input and outputs. It...
See More
Passivity-Based Control to Guarantee Stability | Control Systems in Practice...
15 min
Beginner
Video
Theory
Learn about passivity-based control to guarantee closed-loop stability of feedback systems. Consider different ways to assess the stability of systems other than looking at gain and phase...
See More
Yann LeCun’s Deep Learning Course at CDS
Intermediate
Course
Theory
This course concerns the latest techniques in deep learning and representation learning, focusing on supervised and unsupervised deep learning, embedding methods, metric learning...
See More
Using ‘fminsearch’ to Minimize a Function Specified by a File with Extra Par...
25 min
Beginner
Video
Application
In this video we show 4 different ways to use/call Matlab’s ‘fminsearch’ function to perform unconstrained optimization.Topics and timestamps:0:00 – Introduc...
See More
1D Kinematics - Speed, Velocity, Acceleration
51 min
Beginner
Video
Theory
Walter Lewin is one of the most reputed professors and was a former lecturer at MIT. His free to watch series on YouTube titled 8.01 is an excellent one for undergrads and high school...
See More
What are Transfer Functions? | Control Systems in Practice
10 min
Beginner
Video
Theory
This video introduces transfer functions - a compact way of representing the relationship between the input into a system and its output. It covers why transfer functions are so popular and...
See More
Introduction to Classic Control Theory (Japanese)
Beginner
Video
Theory
A collection of video lectures by Yuki Nishimura covering an introduction to classic control theory.
See More
Online and Recursive System Identification | System Identification, Part 4
19 min
Beginner
Video
Theory
Online system identification algorithms estimate the parameters and states of a model as new data is measured and available in real-time or near real-time. Brian Douglas covers what online...
See More
Android and iPhone E-Learning App for Nyquist Stability Criterion
Intermediate
App
Theory
In our Nyquist App, you can analyze the stability of the closed loop by using the Nyquist stability criterion. With the Nyquist stability criterion, you can determine the stability of the...
See More
Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields...
Beginner
Book
Theory
From the reviews: "This book is concerned with the application of methods from dynamical systems and bifurcation theories to the study of nonlinear oscillations. Chapter 1 provides a review...
See More
Systems Engineering, Part 4: An Introduction to Requirements
15 min
Beginner
Video
Theory
Get an introduction to an important tool in systems engineering: requirements. You'll learn about the three things every requirement must have and what makes a requirement valid. You'll also...
See More
A Hybrid Lab Experience: Blending Hands-on Explorations with the Flexibility...
30 min
Beginner
Article / Blog
Demonstration
This case study examines how the Earth and Space Science and Engineering (ESSE) department at York University in Toronto offered a meaningful remote laboratory experience to over 180...
See More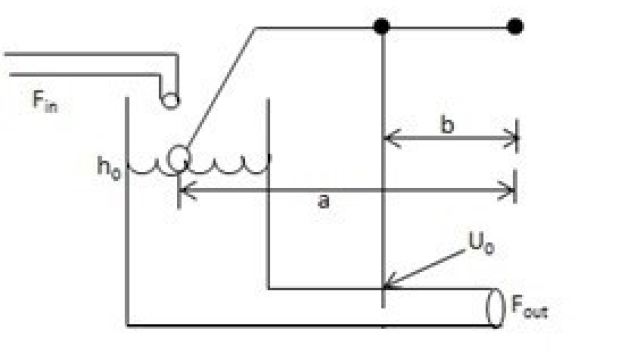
Understanding P, I, and D
30 min
Intermediate
Article / Blog
Theory
Understanding what the proportional, integral, and derivative terms do within the PID controller is essential to choose appropriate action, trouble shoot controllers, chose appropriate...
See More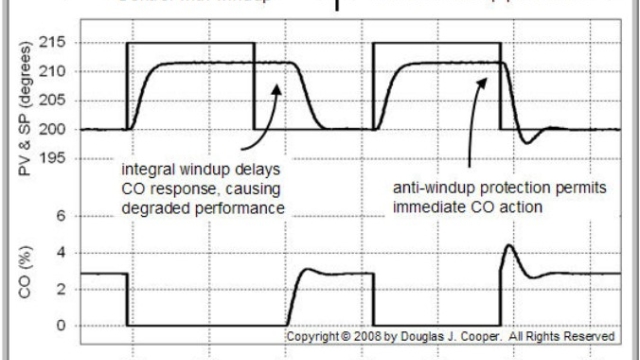
Integral Wind-Up and Solution
Intermediate
Article / Blog
Application
What is integral wind-up and how velocity mode solves it.
See More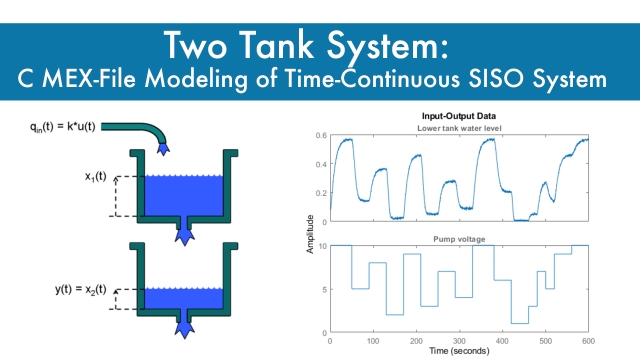
Two Tank System: C MEX-File Modeling of Time-Continuous SISO System
Intermediate
Software
Demonstration
This MATLAB example shows how to perform IDNLGREY modeling based on C MEX model files. It uses a simple system where nonlinear state space modeling really pays off.
See More")
Robotic Car - How to read Gyro Datasheets (Part 1)
14 min
Beginner
Video
Theory
Have you ever been lost trying to understand the information in a gyro datasheet? This video should help! In this first part I go through the mechanical characteristics of a MEMS gyro and...
See More
Quanser QUBE-Servo 2: Low-cost Teaching Platform for Controls
Beginner
Hardware
Application
The Quanser QUBE-Servo 2 is a fully integrated, modular servomotor lab experiment designed for teaching mechatronics and control concepts at the undergraduate level. Ideal for teaching speed...
See More
Computing Euler Angles: Tracking Attitude Using Quaternions
74 min
Beginner
Video
Theory
In this video we continue our discussion on how to track the attitude of a body in space using quaternions. The quaternion method is similar to the Euler Ki...
See More
System Identification: DMD Control Example
8 min
Intermediate
Video
Theory
This lecture gives a Matlab example of dynamic mode decomposition with control (DMDc) for full-state system identification.
See More
DSP Lecture 1: Signals
66 min
Beginner
Video
Theory
This is a video lecture for ECSE-4530 Digital Signal Processing by Rich Radke, Rensselaer Polytechnic Institute.
See More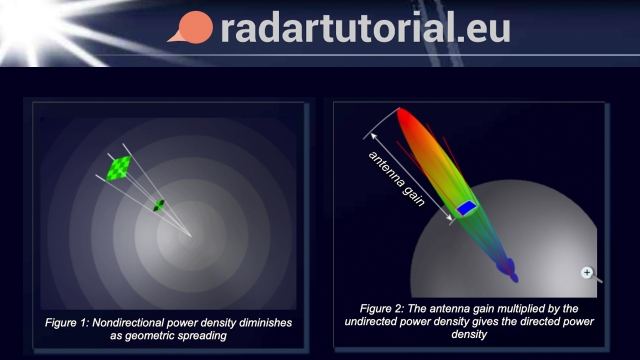
The Radar Range Equation - radartutorial.eu
Beginner
Article / Blog
Theory
This article describes the radar range equation. The radar range equation represents the physical dependences of the transmit power, which is the wave propagation up to the receiving of the...
See More