


Numerically Calculating Partial Derivatives
59 min
Beginner
Video
Theory
In this video we discuss how to calculate partial derivatives of a function using numerical techniques. In other words, these partials are calculated withou...
See More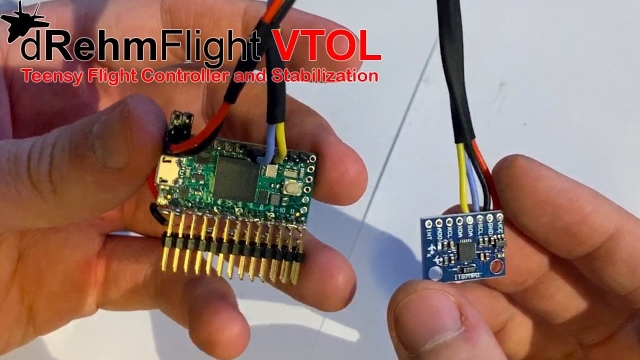
Building the Flight Controller Hardware - dRehmFlight VTOL
11 min
Beginner
Video
Application
This video will show you how to setup and solder the default recommended hardware setup for the dRehmFlight VTOL flight controller package. This hardware configuration will work with the...
See More
Posicast Control 4 - ( In English )
12 min
Beginner
Video
Theory
This video continues to explore the gantry crame control simulations in open-loop- The main focus is the half-cycle Posicast.
See More
The Inverse Laplace Transform
48 min
Beginner
Video
Theory
In this video we show how to perform the inverse Laplace transform on a signal in the Laplace domain to obtain its equivalent representation in the time doma...
See More
Understanding Sensor Fusion and Tracking, Part 5: How to Track Multiple Obje...
15 min
Beginner
Video
Theory
This video describes two common problems that arise when tracking multiple objects: data association and track maintenance. We cover a few ways to solve these issues and provide a general...
See More
Understanding and Sketching Individual Bode Plot Components
148 min
Beginner
Video
Theory
In this video we illustrate how 7 types of simple transfer functions contribute to a bode plot. We refer to these as ‘components’ and will cover the followi...
See More
Machine Learning - Andrew Ng, Stanford University
Beginner
Video
Theory
Machine learning is the science of getting computers to act without being explicitly programmed. In the past decade, machine learning has given us self-driving cars, practical speech...
See More
Control Bootcamp: Example Frequency Response (Bode Plot) for Spring-Mass-Da...
18 min
Beginner
Video
Theory
This video shows how to compute and interpret the Bode plot for a simple spring-mass-damper system.
See More
Lecture 23: Bode plots
48 min
Beginner
Video
Theory

Peter Ponders PID - LQR Optimizing Two Outputs
16 min
Beginner
Video
Theory
Peter Ponders PID - Controlling a non-integrating single pole system. Part 3...
9 min
Beginner
Video
Theory
Part 3 uses PI control which is the only practical means of control a non-integrating single pole system.http://deltamotion.comhttp://forum.deltamotion.com
See More
Standing Waves Demonstration
44 min
Beginner
Video
Theory
In this video we demonstrate standing waves. We show how the system can be excited by oscillating at specific frequencies to generating standing waves. The...
See More![Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_431.jpg?itok=vs89WnA2 "Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart [Control Bootcamp]")
Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart...
13 min
Beginner
Video
Theory
Here we design an optimal full-state feedback controller for the inverted pendulum on a cart example using the linear quadratic regulator (LQR). In Matlab, we find that this is a simple one...
See More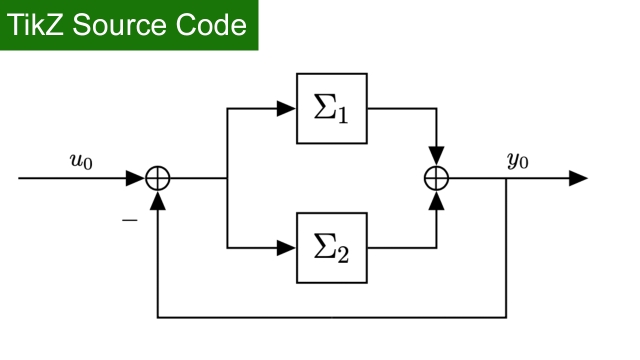
TikZ source Code: Feedback systems
Beginner
Source Code
Application
TikZ source Code: Feedback systems
See More
Laplace domain – tutorial 4: Laplace transform examples
20 min
Beginner
Video
Theory
In this video, we solve lots of examples to practice how to quickly find Laplace transform using the table of pairs & properties and five golden rules on ROC...
See More![Fourier Series and Gibbs Phenomena [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_363.jpg?itok=YEl5oqig "Fourier Series and Gibbs Phenomena [Matlab]")
Fourier Series and Gibbs Phenomena [Matlab]
7 min
Beginner
Video
Application
This video will describe how to compute the Fourier Series in Matlab and Gibbs Phenomena that appear for discontinuous functions.
See More
Machine Learning Control: Genetic Programming Control
10 min
Beginner
Video
Theory
This lecture discusses the use of genetic programming to manipulate turbulent fluid dynamics in experimental flow control.
See More
Second Order Dynamics in Process Control
17 min
Beginner
Video
Theory
How do we simulate two first order transfer functions in series, a inherently second order system, or two coupled differential equations? Tune in to find out!
See More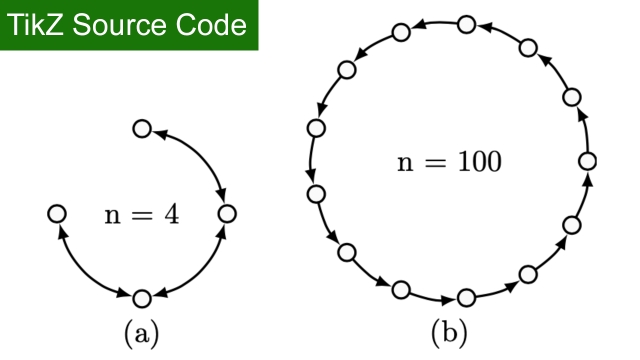
TikZ source Code: Simulation Graph
Beginner
Source Code
Application
TikZ source Code: Simulation Graph
See More
Frequency domain – tutorial 4: Gibbs phenomenon
4 min
Beginner
Video
Theory
In this video, we quickly review the Gibbs phenomenon which involves two facts:1) Fourier sums overshoot at a jump discontinuity2) overshoot does not disapp...
See More
Understanding Model Predictive Control, Part 6: How to Design an MPC Control...
9 min
Beginner
Video
Theory
Learn how to design an MPC controller for an autonomous vehicle steering system using Model Predictive Control Toolbox™. This video walks you through the design process of an MPC controller...
See More
Visually Determining Transfer Functions
6 min
Beginner
Video
Theory
Process Control classes can get pretty hard to follow when you lose sight of what transfer functions really are. How do you get them in the first place?
See More
Lecture 18: PI and Lag Compensator Design using Root Locus
41 min
Beginner
Video
Theory

PID Control - A brief introduction
7 min
Beginner
Video
Theory
In this video, I introduce the topic of PID control. This is a short introduction design to prepare you for the next few lectures where I will go through several examples of PID control....
See More
Deploying Deep Learning Models | Deep Learning for Engineers, Part 5
15 min
Beginner
Video
Theory
This video covers the additional work and considerations you need to think about once you have a deep neural network that can classify your data. We need to consider that the trained network...
See More